Transverse carrying machine arm and method suitable for high load
A technology for handling machines and high loads. It is applied in the field of handling robots. It can solve the problems of limited range of lateral activities, low load capacity, and inability to meet the diversified needs of enterprises, and achieve the effect of expanding the range of lateral activities and meeting diversified needs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
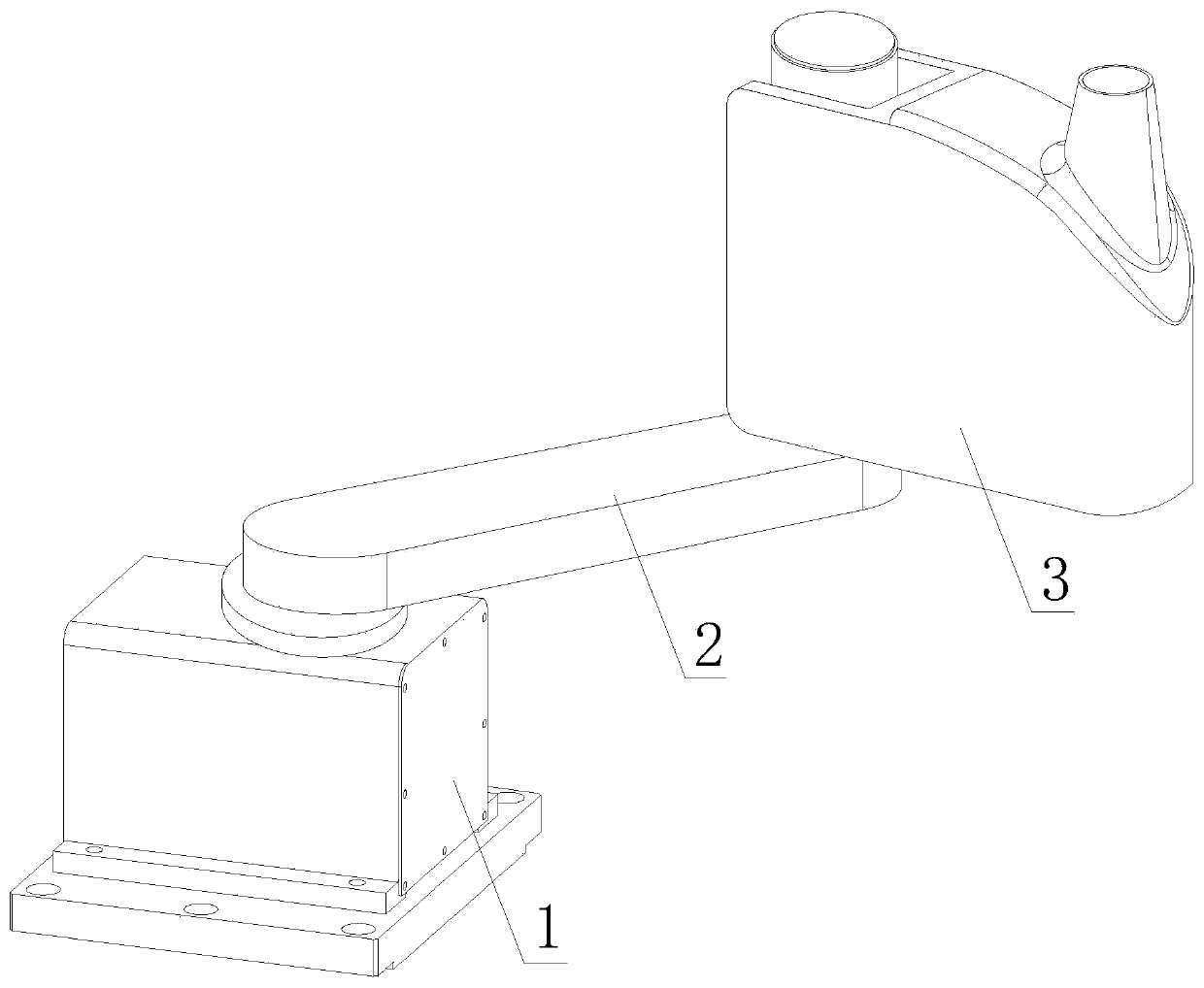
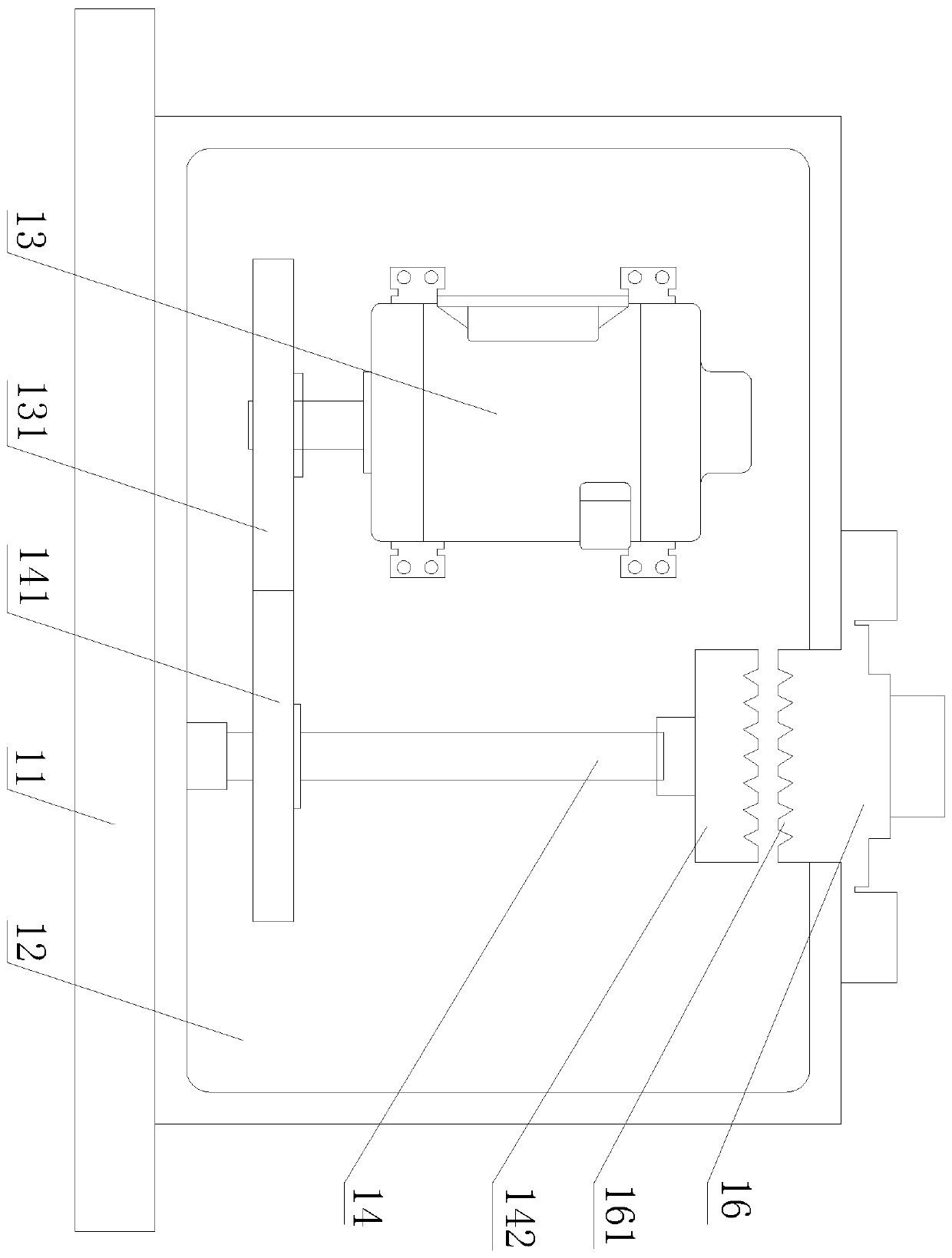
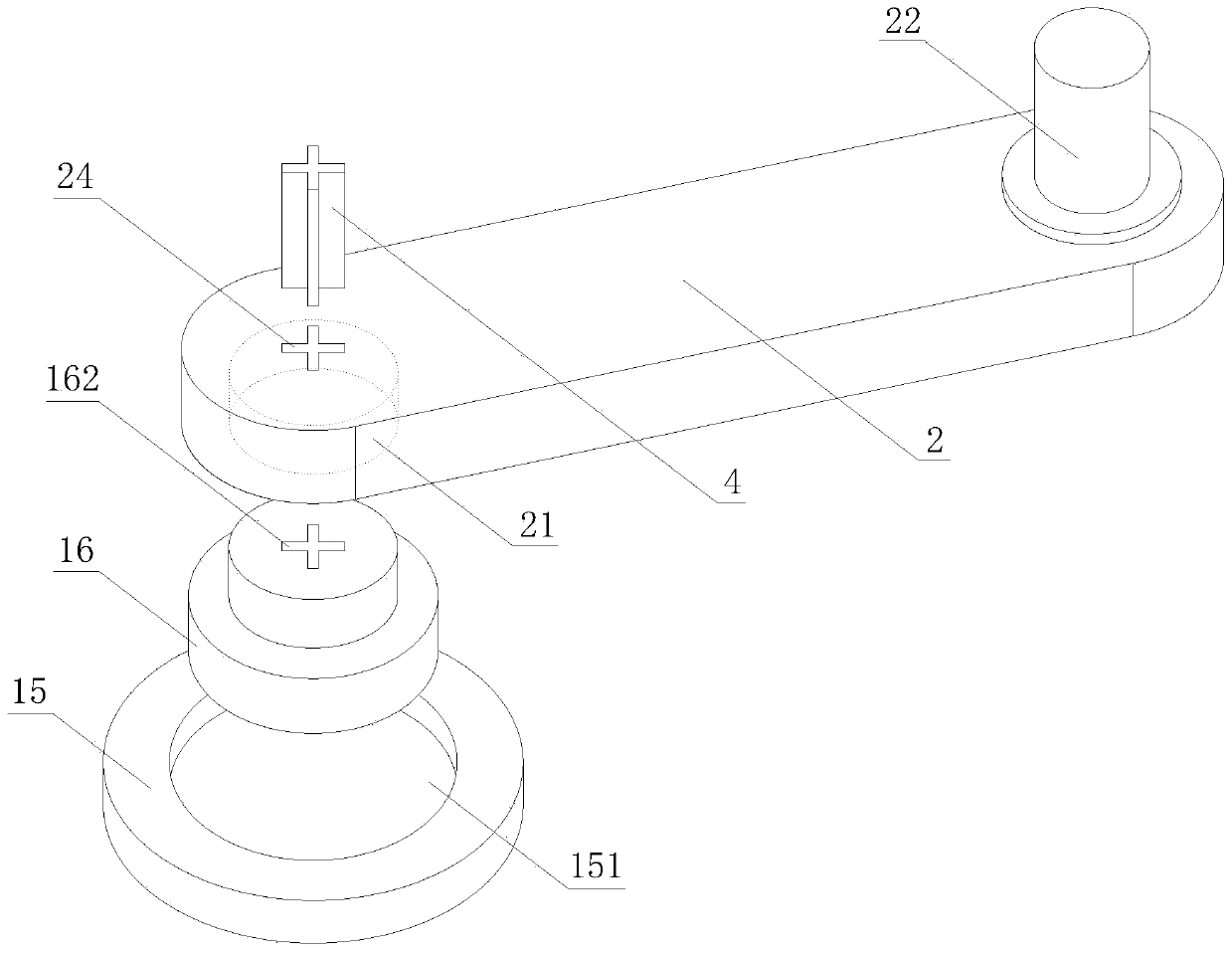
[0027] refer to Figure 1-5 , a horizontal transfer robot arm suitable for high loads, including a base 1, a moment arm 2 and an operating arm 3, the base 1 includes a bottom plate 11, a casing 12, a motor A13, a central axis 14, a chassis 15 and a pillow block 16 The operating arm 3 includes a shell 31, a motor B32 and a connection plate B33; wherein the casing 12 is installed on the base plate 11, the motor A13 is installed at one end in the casing 12, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



