Multi-station scanning point cloud global registration method based on graph optimization
A multi-station, scanning point technology, applied in the field of aircraft detection, can solve problems such as large amount of data calculation, large registration error, error accumulation, etc., and achieve the effect of overcoming uneven density, high detection accuracy and efficiency, and improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The method for global registration of multi-site scanning point clouds based on graph optimization of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
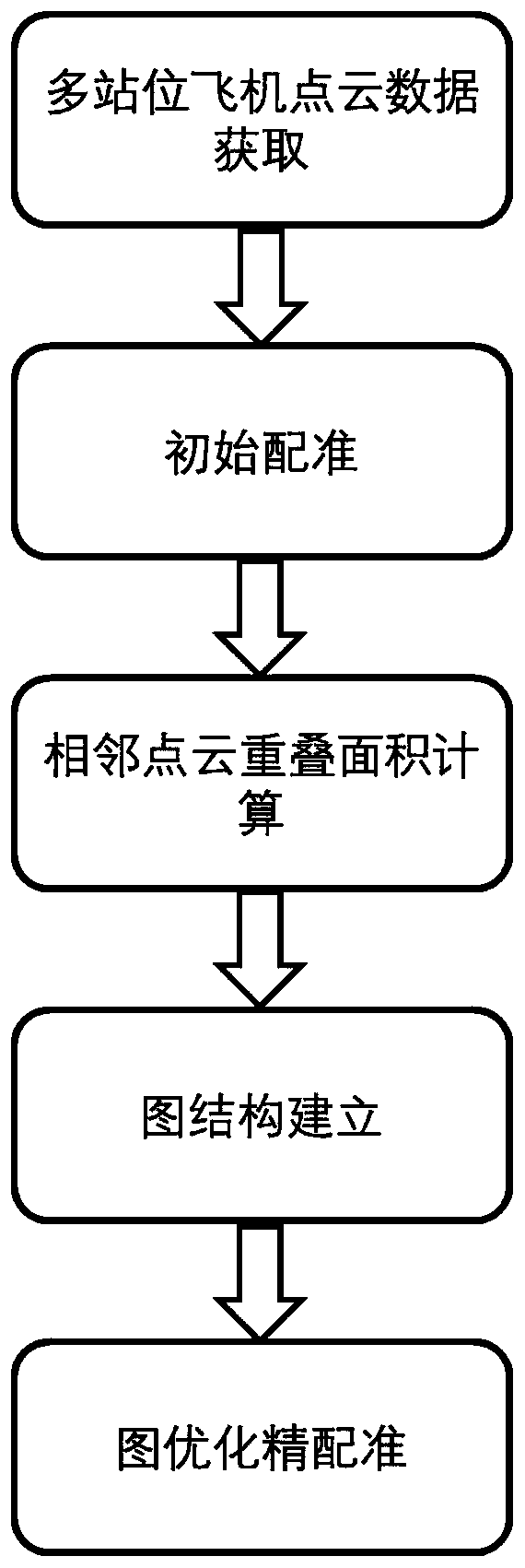
[0048] Such as figure 1 As shown, a global registration method of multi-site scanning point cloud based on graph optimization includes the following steps:
[0049] Step 1. Obtain the multi-view original aircraft 3D point cloud data with targets.
[0050] Use a 3D laser scanner (such as the ScanStationP20 model) to obtain and save the local point cloud data of the aircraft at multiple stations. At each station, more than 4 cross targets are placed between the aircraft and the 3D laser scanner as the basis for initial registration. The target placement method is as follows: the cross targets are scattered between the 3D laser scanner and the aircraft, and each cross target faces the 3D laser scanner, while avoiding the collinear situ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More