

Finite frequency range robust iterative learning control method for series inverted pendulum
An iterative learning control, limited frequency technology, applied in the field of robust iterative learning control with limited frequency range, which can solve the problems of system control accuracy and dynamic quality reduction, slow convergence speed, and difficulty in solving series inverted pendulum trajectory tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0160] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
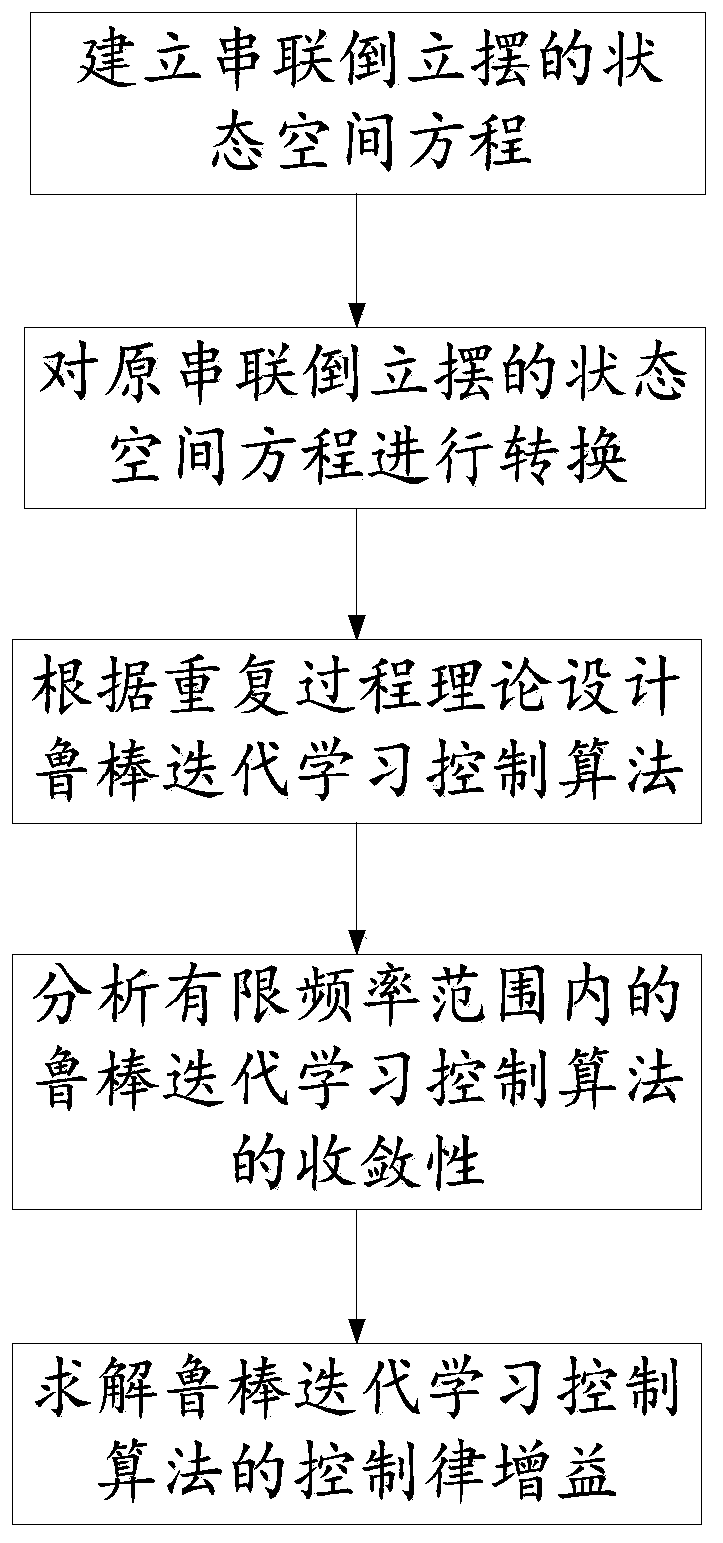
[0161] This application discloses a limited frequency range robust iterative learning control method for a series inverted pendulum. The flow chart of the method is as follows figure 1 As shown, the series inverted pendulum itself has the characteristics of strong coupling, nonlinearity and instability, and it is difficult to establish a state space model for it. However, through reasonable assumptions about the system and reasonable approximation of some system variables, the state-space model established for the series inverted pendulum system in the inertial coordinate system can be used using classical Newtonian mechanics.
[0162] Before the step of establishing the state-space equations of the tandem inverted pendulum, the method further includes:
[0163] Before modeling the tandem inverted pendulum, the following assumptions are mad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More