

Multi-acoustic sensor array intelligent sensing method and system
An acoustic sensor and intelligent perception technology, applied in the field of target positioning and recognition, can solve the problems of large tracking errors, achieve the effects of reducing tracking errors, improving recognition accuracy, and eliminating the influence of noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
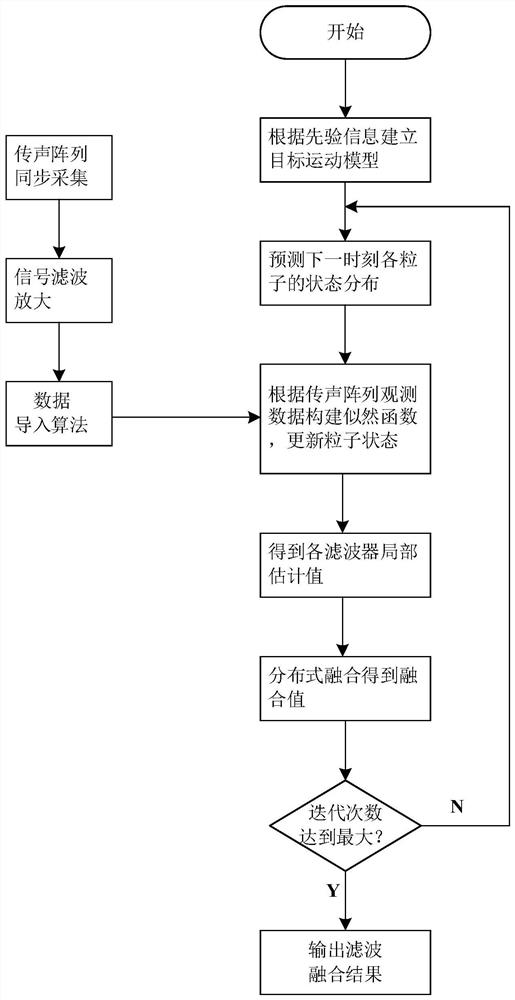
[0040] Such as image 3 A multi-acoustic sensor array cooperative positioning method is shown, including an acoustic target positioning and identification method, wherein the acoustic target positioning method includes the following steps:
[0041] The acoustic target localization method comprises the following steps:
[0042] According to the conversion relationship between the spatial position of the sound source and the azimuth angle, the azimuth observation model of the target sound source is established,
[0043] Determine the spatial spectrum distribution of the propagation operator algorithm according to the azimuth observation model;
[0044] The spatial spectral distribution of the propagation operator algorithm is applied to the likelihood function of the improved particle filter, and the particle filter method is used to calculate the state estimation value of each microphone array for the acoustic target.
[0045] According to the estimated value of each acoustic...
Embodiment 2
[0103] Based on the principle of the system and method of the above-mentioned embodiment, this embodiment specifically uses 5 linear sound transmission arrays, the number of array elements in each array is M=8, the number of snapshots is 100, the signal-to-noise ratio SNR=5, and five detection nodes The positions are Node1(80,100), Node2(300,90), Node3(380,200), Node4(250,260) and Node5(120,250), the unit is meter. The particle filter adopts period T=1s, particle number N=500, and tracking time is 60s. The sound source target moves uniformly in the two-dimensional plane from the initial position (5, 5) with the speed v=[7.5, 4.5], and the unit is m / s. For the simulation results, see Figure 4 , from the perspective of the tracking effect of the spatial position, the multi-sensor cooperative tracking algorithm based on PF-MUSIC can successfully realize the dynamic tracking of the target in the two-dimensional plane.
Embodiment 3
[0105] Based on the system and method of Embodiment 1, this embodiment specifically uses 3 L-shaped sound transmission arrays, the number of array elements in each array is M=16, the number of snapshots is 100, the signal-to-noise ratio SNR=5, and 3 detection node positions Node1(40,100,0), Node2(80,30,10) and Node3(100,100,20) respectively. The particle filter adopts period T=1s, particle number N=500, and tracking time is 30s. The sound source target moves from the initial position (5, 5, 5) at a speed v = [7.17, 7.17, 4.17], the unit is m / s, and moves uniformly in the three-dimensional plane. For the simulation results, see Figure 5, from the tracking effect of the spatial position, the multi-sensor cooperative tracking algorithm based on PF-MUSIC can successfully realize the dynamic tracking of the target in the three-dimensional plane, and the positioning accuracy is high.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More