

Continuum robot and satellite fueling system
A robot and continuum technology, applied in the field of robotics, can solve the problem that robots are difficult to operate in small spaces, achieve high spatial manipulation accuracy and resolution, reduce quality and cost, and achieve precise spatial docking effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
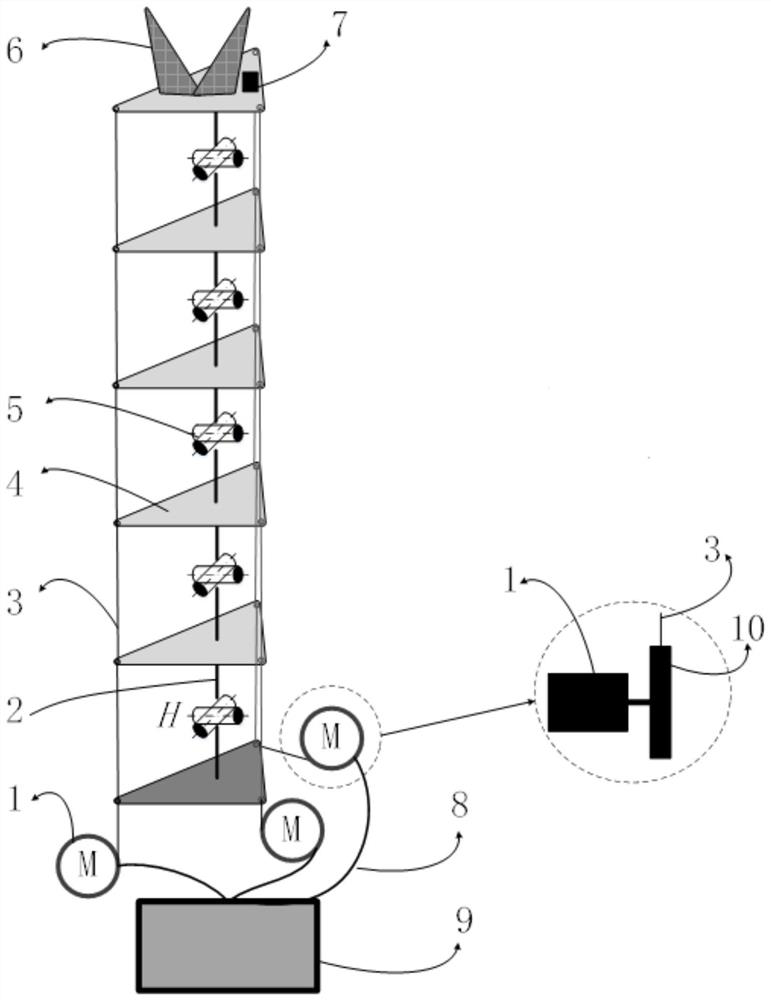
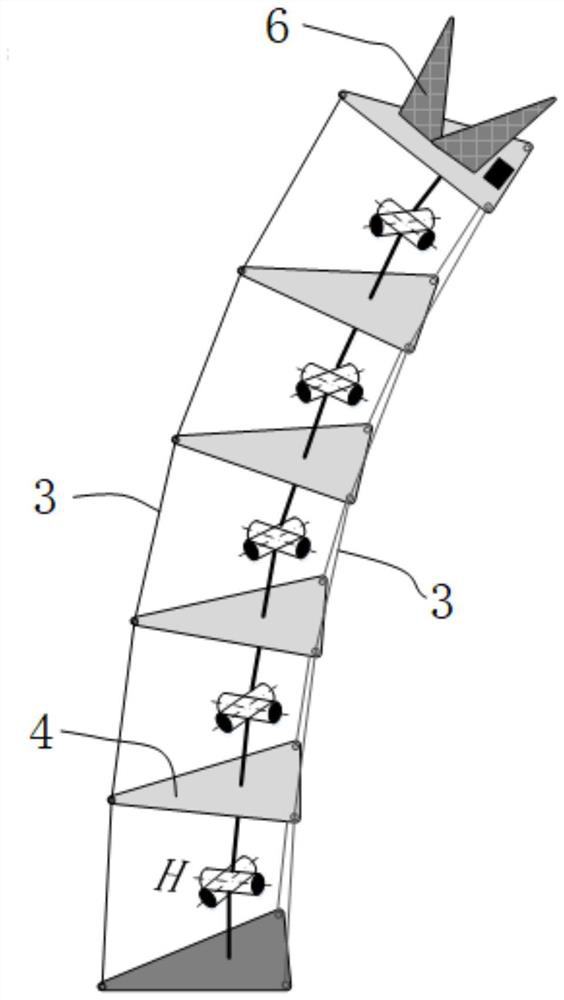
[0032] This embodiment provides a continuum robot, such as figure 1 and figure 2 As shown, in a preferred embodiment, it comprises a support module, a drive module and an actuator 6 mounted at the end of the support module (shown above in the figure). The support module includes N series-connected hinges 5, where N is an integer greater than 1, figure 1 As shown in the figure, five hinges 5 are provided, and the hinges 5 may be ball hinges or Hooke hinges in the prior art. The drive module drives the five hinges 5 to move, so that the support module is bent to adjust the posture of the continuum robot, and then the posture of the actuator 6 is adjusted. The number of hinged parts 5 can be selected according to actual requirements, and in practice, the length of the support module can be changed by increasing or decreasing the number of hinged parts 5 .
[0033] The support module of the present invention includes N series-connected hinges 5, that is, it has N movable joint...
Embodiment 2
[0044] This embodiment provides a satellite fueling system using the continuum robot of the above-mentioned first embodiment, which includes a satellite platform with a fuel supply system, the continuum robot is installed on the satellite platform, the actuator 6 is a gripper, and the fuel The filler nipple of the supply system is held by the gripper.
[0045] According to the bending deformation of the support module, the posture of the continuum robot can be changed, so as to realize the dexterous operations such as oil pipeline movement and oil pipeline docking of the continuum robot, which can meet the requirements of control response flexibility and docking accuracy during filling and manipulation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More