

Vehicle-mounted laser scanning system external parameter calibration method and device
A technology of vehicle-mounted laser scanning and calibration method, which is applied in the field of data processing and can solve problems such as low efficiency and slowing down the calibration progress.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below with reference to the accompanying drawings and examples.
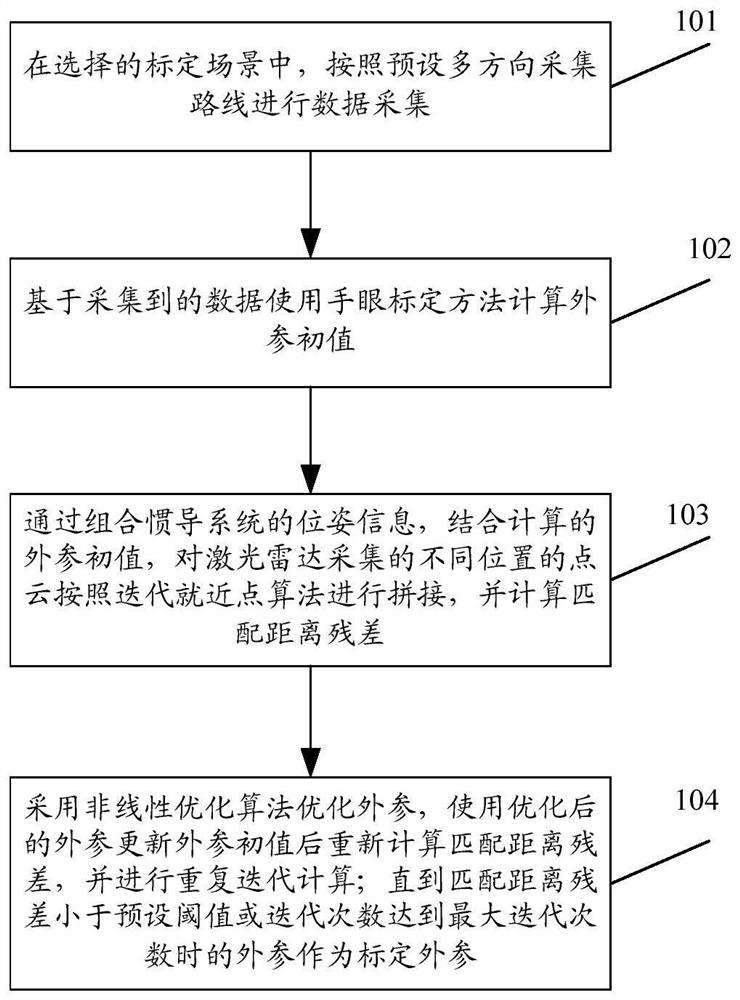
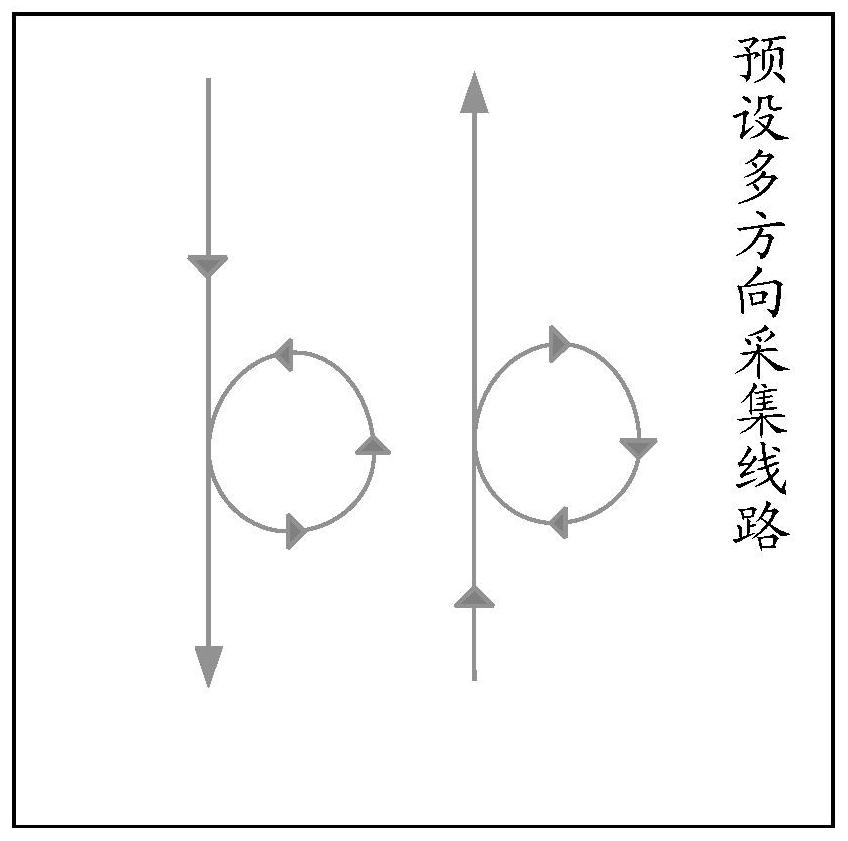
[0026] In the embodiment of the present application, a method for calibrating external parameters of a vehicle-mounted laser scanning system is provided, which is applied to a vehicle-mounted laser scanning system, selects any scene to use hand-eye calibration, and iterative closest point algorithm (Iterative Closest Point, ICP) for automatic calibration, the The solution quickly and automatically realizes the accurate calibration of the external parameters of the vehicle-mounted laser scanning system without the need for a fixed calibration field or manual participation in point selection.
[0027] The following describes in detail the calibration process of the external parameters of the vehicle-mounted laser scanning system in the em...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More