

Translation magnetic wall-climbing robot suitable for large-curvature steel plate and working mode thereof
A wall-climbing robot and large curvature technology, applied in the field of wall-climbing robots, can solve the problems of increasing magnetic adsorption force or vacuum adsorption force, insensitivity to movement, friction, etc., and achieve the effects of improving motion performance, flexible steering, and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions in the implementation of the present invention will be clearly and completely described below with reference to the accompanying drawings and implementation methods. The described embodiments are only a part of the embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, this All other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
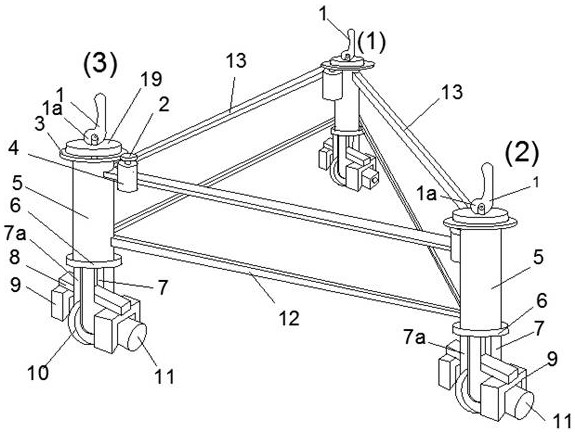
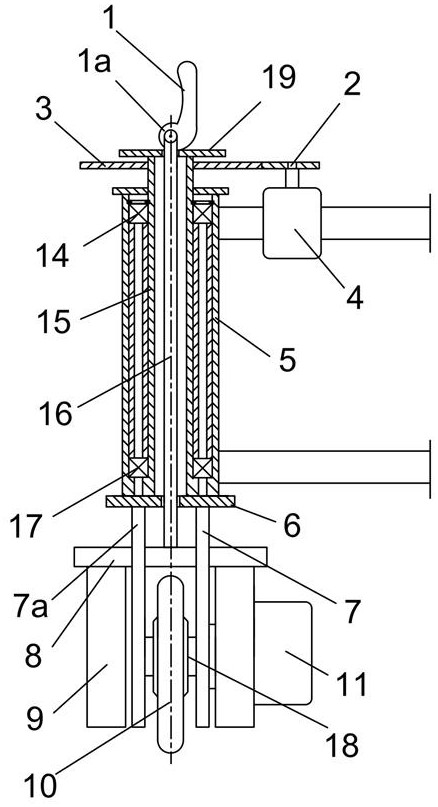
[0023] Due to the irregularity of the surface working environment, the movement of the wall-climbing robot needs special consideration, especially the steering movement of the robot. The wheel train structure of the robot of the present invention can easily realize the steering and translation movement of the robot, and the robot body can be maintained at this time. Do not move. When the robot is placed on the working surface of the steel plate, the robot is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More