

Multi-target tracking method and tracking system for aerial images of unmanned aerial vehicle
A multi-target tracking and aerial image technology, which is applied in the field of image processing and computer vision, can solve problems such as false detection and similar target crosstalk, and achieve high-efficiency detection, high robustness and detection effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
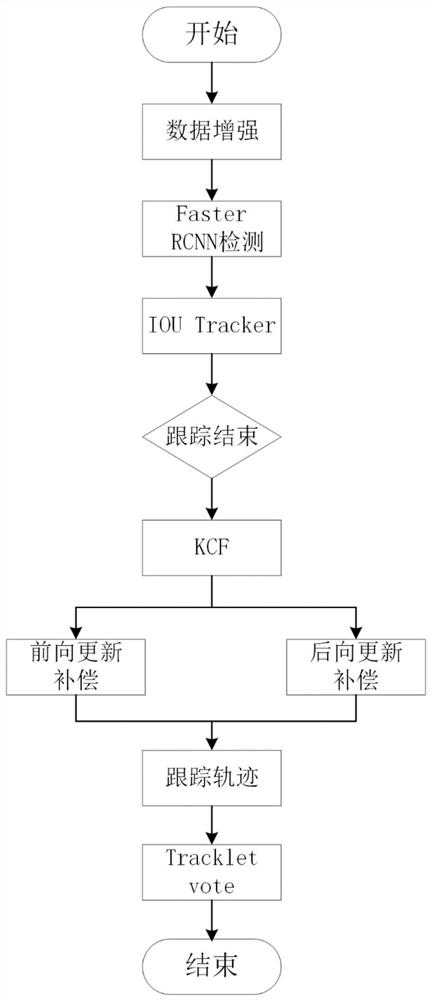
[0037] The present invention proposes a multi-target tracking method for unmanned aerial vehicle images, and the specific steps are as follows:
[0038] (1) Data enhancement (image translation, zooming, channel transformation, illumination change) is performed on the UAV aerial photography dataset.
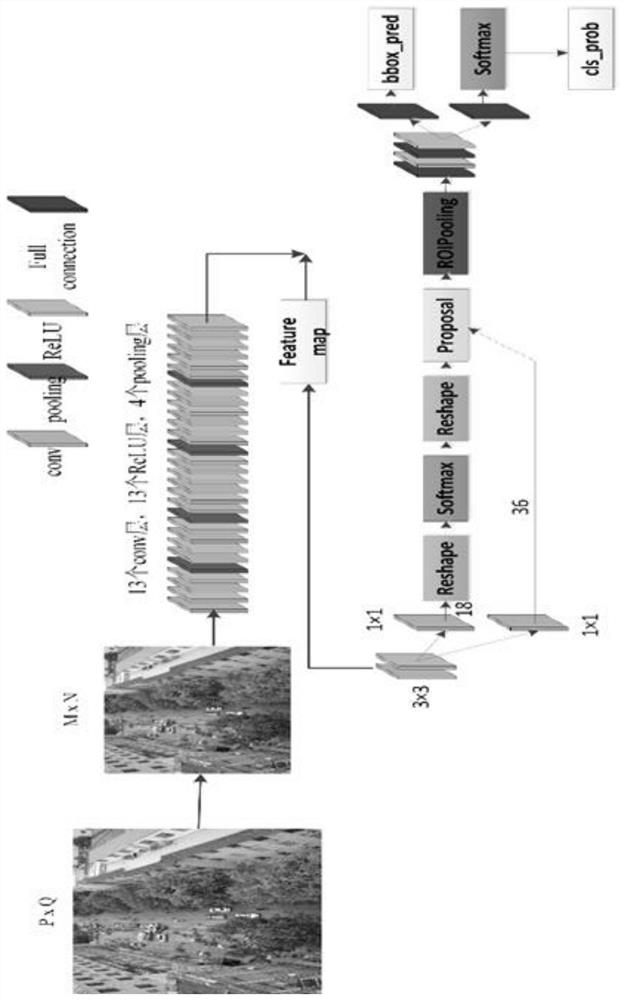
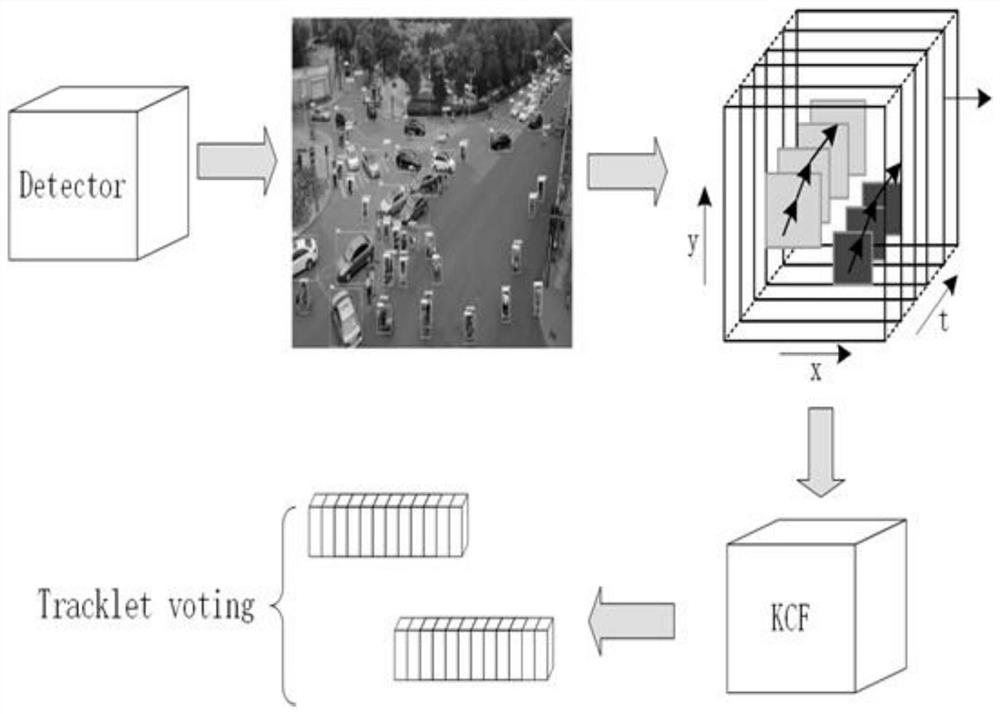
[0039] (2) The image sequence I is input into the deep neural network Faster RCNN for target detection, and the detected result sequence I' is obtained.
[0040] (3) I' is sent to the multi-target tracking network IOU Tracker, and the IOU Tracker adds all the detection frames of the first frame in I' to the tracking queue Q t , and then take the second frame as the current frame F c , the F c All detection boxes in bbox_now and Q t All detection frames in bbox_pre do IOU calculations, and bbox_now gets the corresponding maximum IOU value IOU_max respectively.
[0041] (4) Set the threshold σIO U, if IOU_max>σIO U, then set F c The detection frame in is added to the tracking q...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More