

Strawberry picking robot based on Raspberry Pi
A technology for picking robots and raspberry pie is applied in the field of ripe strawberry identification and picking devices to achieve the effect of accurate identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
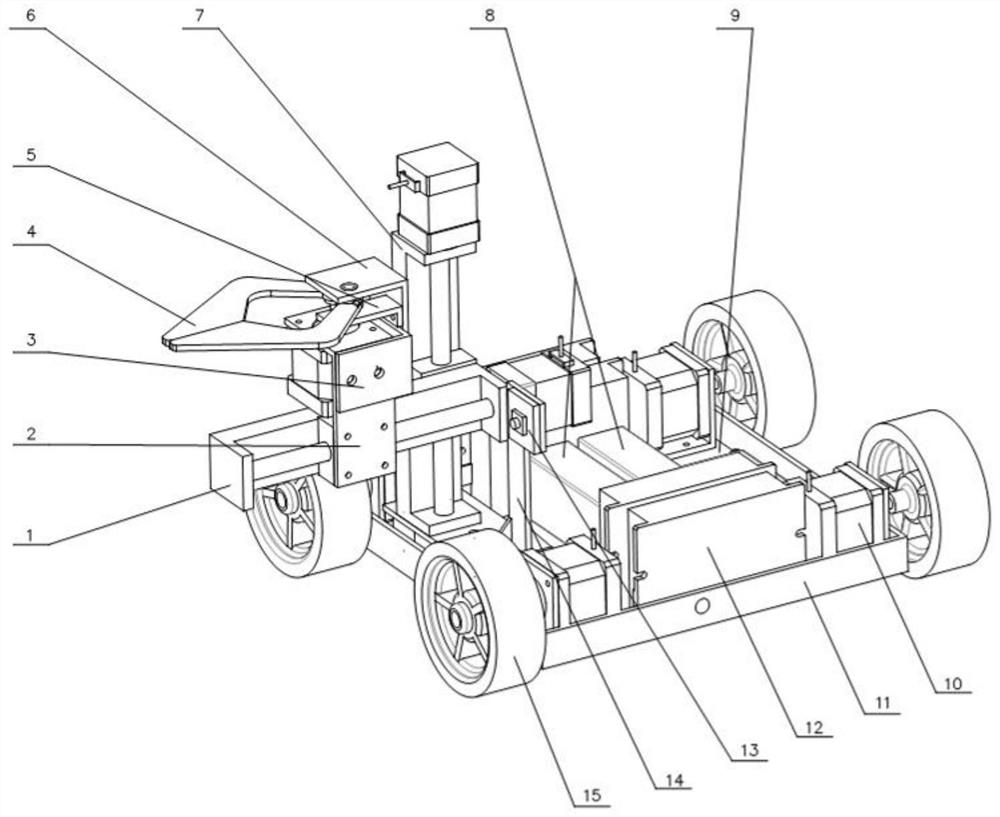
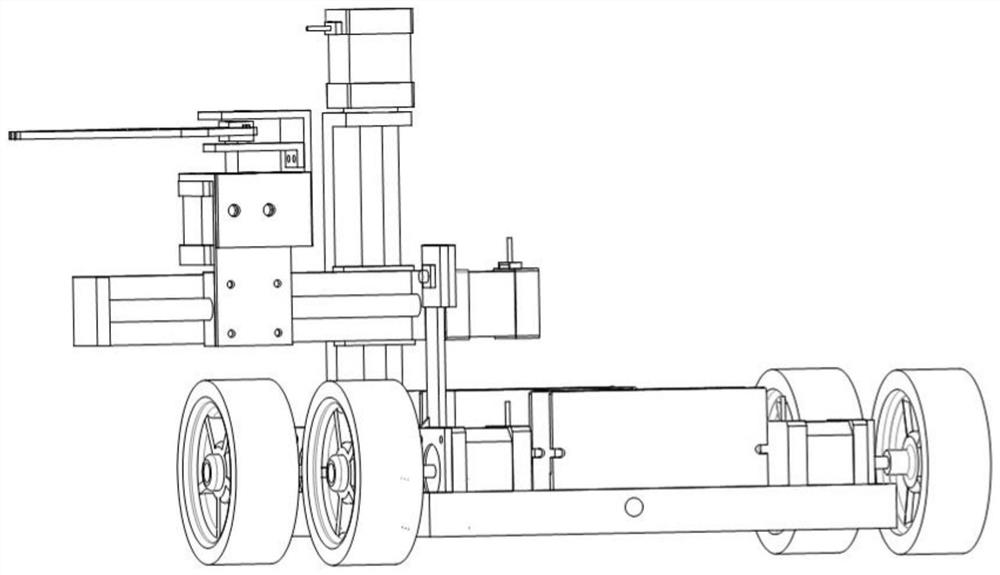
[0030] The strawberry picking robot based on Raspberry Pi according to the present invention is mainly divided into a mechanical structure and an electric control part, and the mechanical structure includes a mobile platform module, a coordinate type mechanical arm module, and a picking mechanism module, such as figure 1 shown. The mobile platform module includes rubber wheels 15, a chassis 11, a stepping motor and a support 10. Specifically, 4 stepping motors and a support 10 are arranged on the chassis 11 to drive 4 rubber wheels 15. The mobile platform module has a simple structure , easy to control, high displacement precision.
[0031] The coordinate robot arm module is used to make the picking mechanism module close to the strawberry fruit, and the picking mechanis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More