

Man-machine one-dimensional interaction force measurement sensor and measurement method for lower limb exoskeleton
A technology of measuring sensors and sensors, which is applied in the field of robots, can solve the problems of only bearing tension, high processing precision, and high manufacturing cost, and achieve the effects of low cost, simple structure, and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
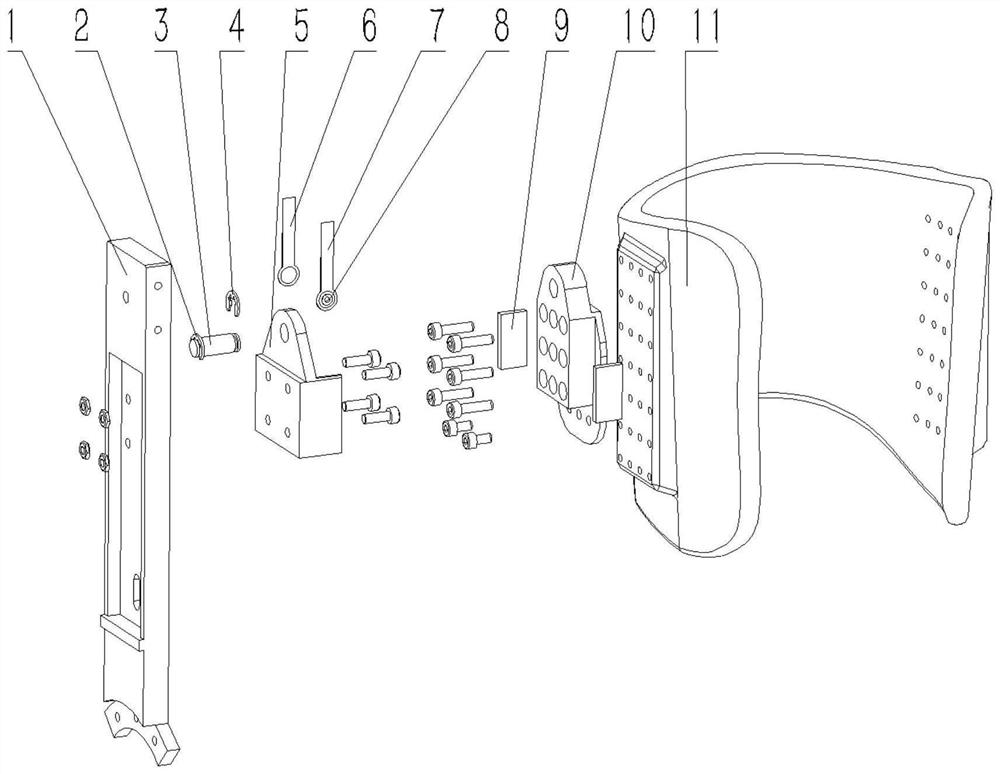
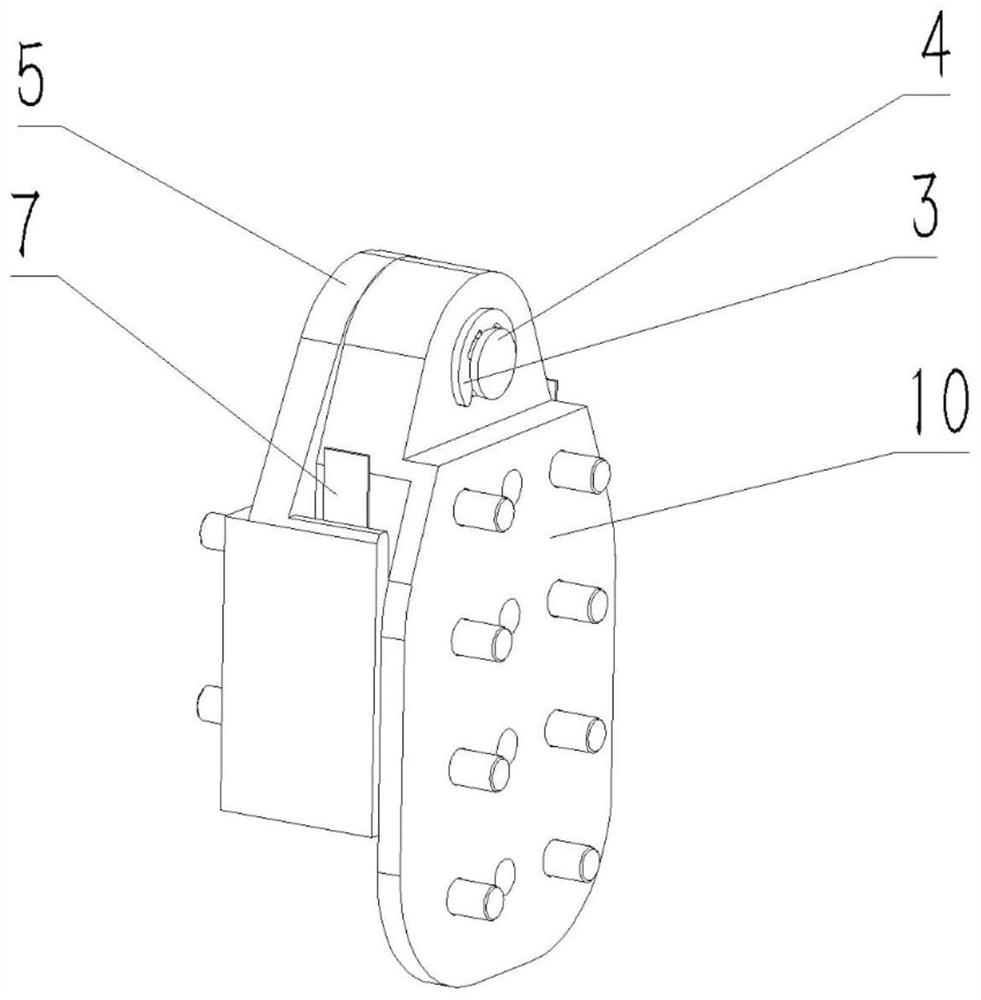
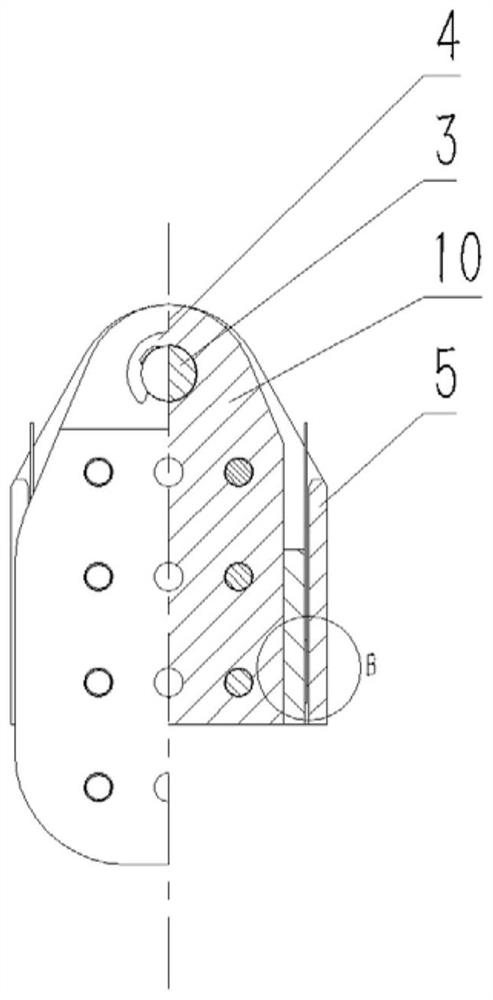
[0023] Please combine figure 1 , figure 2 and image 3 As shown, this embodiment discloses a human-machine one-dimensional interactive force measurement sensor for lower extremity exoskeleton, including a fixed part 5, a movable part 10 matched with the fixed part, a thin film pressure sensor and a connecting part, the fixed part 5 includes a bottom plate and two baffles connected to both sides of the bottom plate and bent and extended from the bottom plate in the same direction; the two baffles are a first baffle and a second baffle, and the movable part 10 is located Between the baffles; the movable part 10 includes a first side facing the first baffle and a second side facing the second baffle; a first film pressure sensor 6 is sandwiched between the first baffle and the first side , the second membrane pressure sensor 7 is clamped between the second baffle plate and the second side, and a gasket 8 is glued on the membrane pressure sensor; the fixed part 5 and the movabl...
Embodiment 2
[0027] This embodiment is the measurement method of the human-machine one-dimensional interactive force measurement sensor in the first embodiment above. The fixed part 5 is fixed on the exoskeleton thigh bar 1, and the movable part 10 is fixed on the thigh binding protector 11. When the human body wears When the thigh is bound to the protective gear 11 and moving, the human body has a relative movement tendency relative to the exoskeleton thigh rod 1, that is, the movable part 10 and the fixed part 5 have a relative movement tendency, so that the thin film pressure sensor can measure the pressure change, according to the first The pressure measured by the membrane pressure sensor 6 and the second membrane pressure sensor 7 are compared to determine the direction of the human-computer interaction force. When the movable part 10 rotates relative to the fixed part 5, if the pressure measured by the first membrane pressure sensor 6 is greater than the pressure measured by the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More