

Gesture and trajectory remote control robot system based on kinect
A robotic system and remote control technology, applied in the direction of program control manipulator, input/output process of data processing, instruments, etc., can solve the problems of tedious and complicated, difficult to change, increase the security cost of the company, etc., to achieve low computing power requirements and save money time, improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the implementation methods and accompanying drawings.
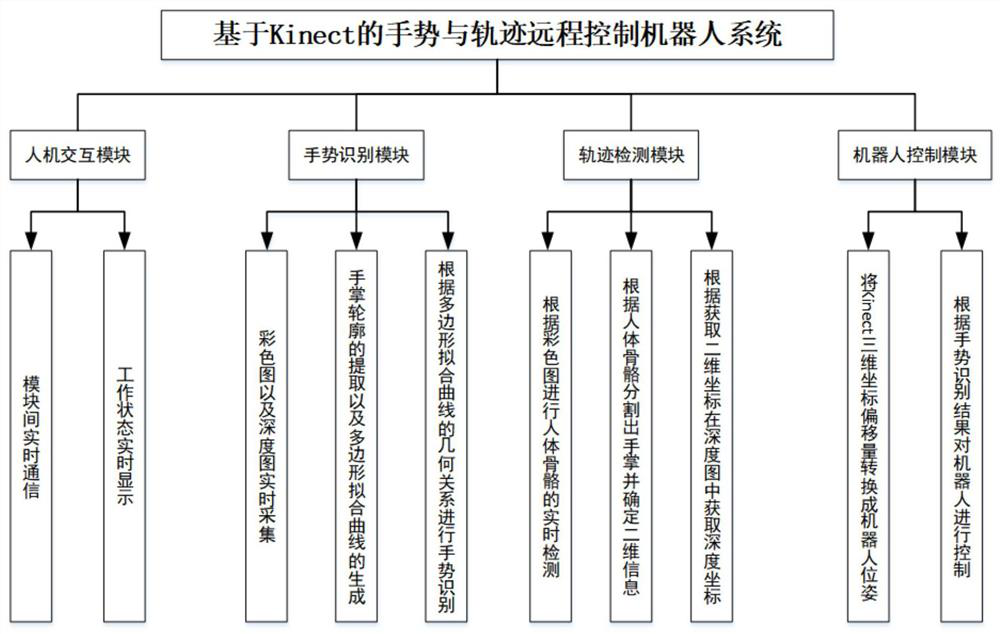
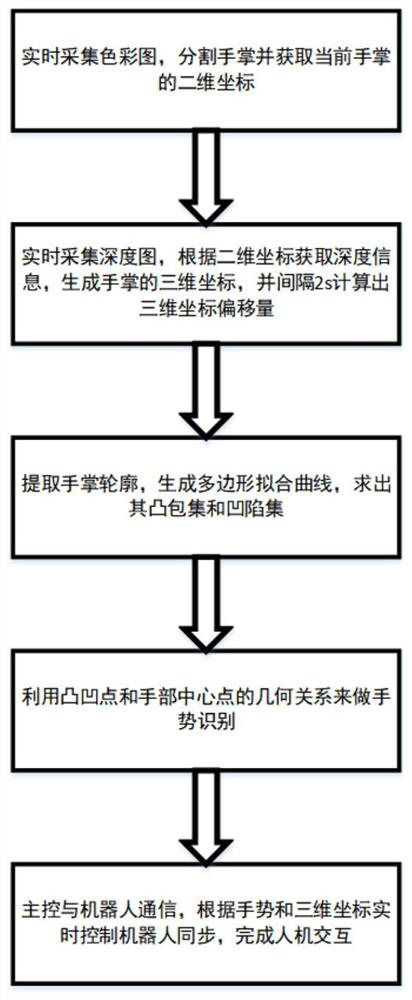
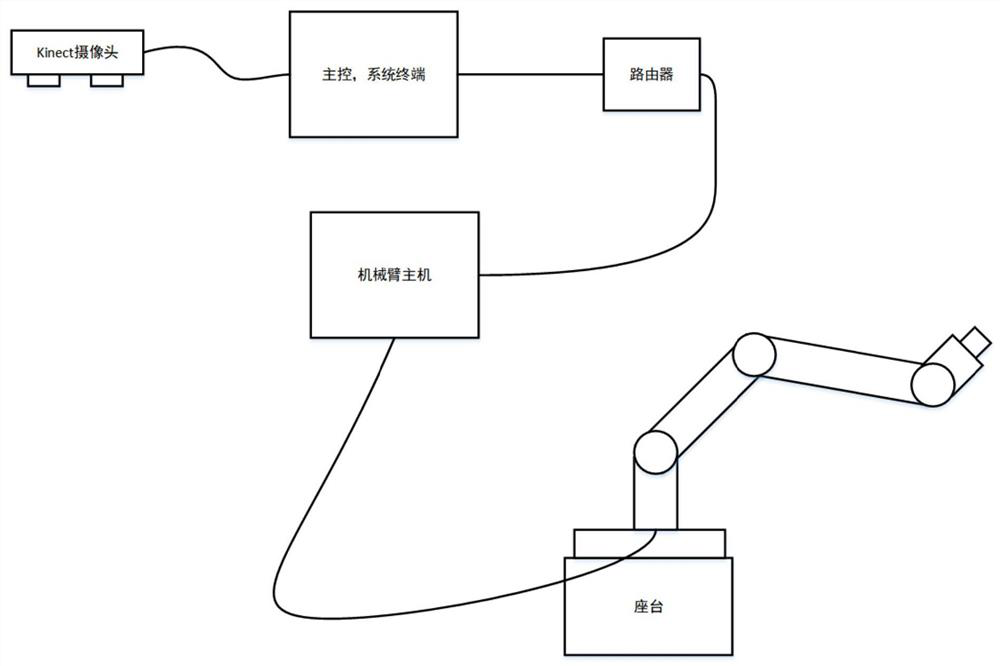
[0048] The invention provides a Kinect-based gesture and trajectory remote control robot system. The system uses the Kinect camera to collect images in real time to sense the movement of the target person, uses the human body model of the Kinect SDK (Software Development Kit) to identify the target person in the color map, segments the palm of the right hand, and uses the two-dimensional coordinate information of the palm to obtain the palm in the depth map Three-dimensional coordinate information, while extracting the outline of the palm and using the polygon fitting curve to determine the gesture, and complete the remote control of the robot. Simplifies robot operation and the safety of robot work in specific scenarios.
[0049] see ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More