

Robot obstacle avoidance trajectory planning method based on imitation learning and robot
A trajectory planning and robotics technology, applied in the field of robotics, can solve problems such as difficulty in implementing robots, and achieve the effects of reducing demand, improving network performance and training stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
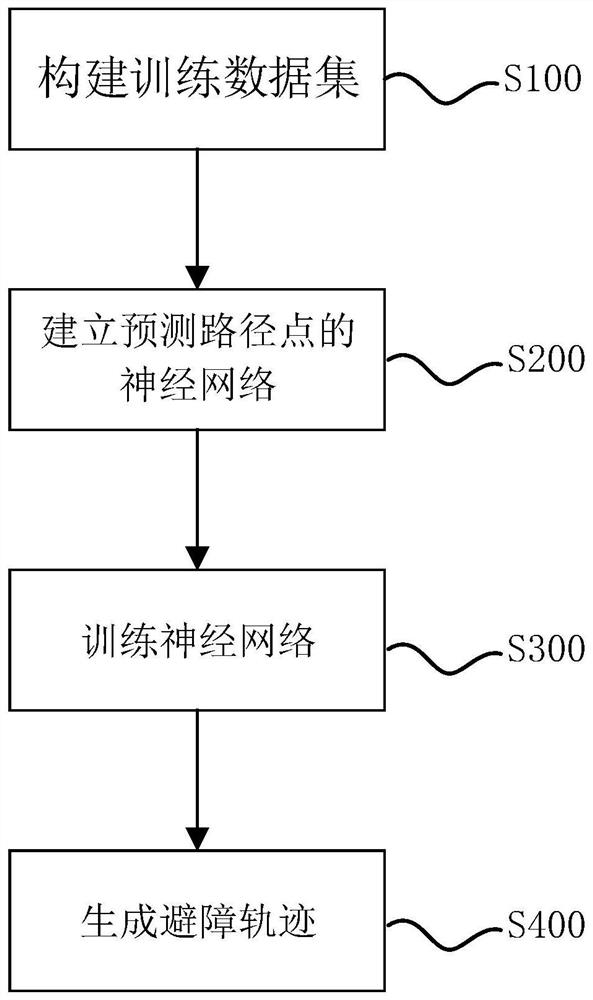
[0064] figure 1 A flow chart of a robot obstacle avoidance trajectory planning method based on imitation learning according to an embodiment of the present invention is shown. Such as figure 1 As shown, the method includes:
[0065] S100: Construct a training data set. Through manual teaching or traditional planning methods, the obstacle avoidance trajectory of the robot and the relevant information of obstacles are obtained in the task scene and used as a training data set. The method of manual teaching can be carried out by remote control, and the traditional planning method includes A* algorithm, RRT algorithm and RRT* algorithm.
[0066] Figure 7 Show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More