

Radar multi-target tracking PHD implementation method
A technology of multi-target tracking and realization method, which is applied in the field of radar multi-target tracking PHD, and can solve the problems of false measurement, poor stability, and inability to directly deal with nonlinear systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
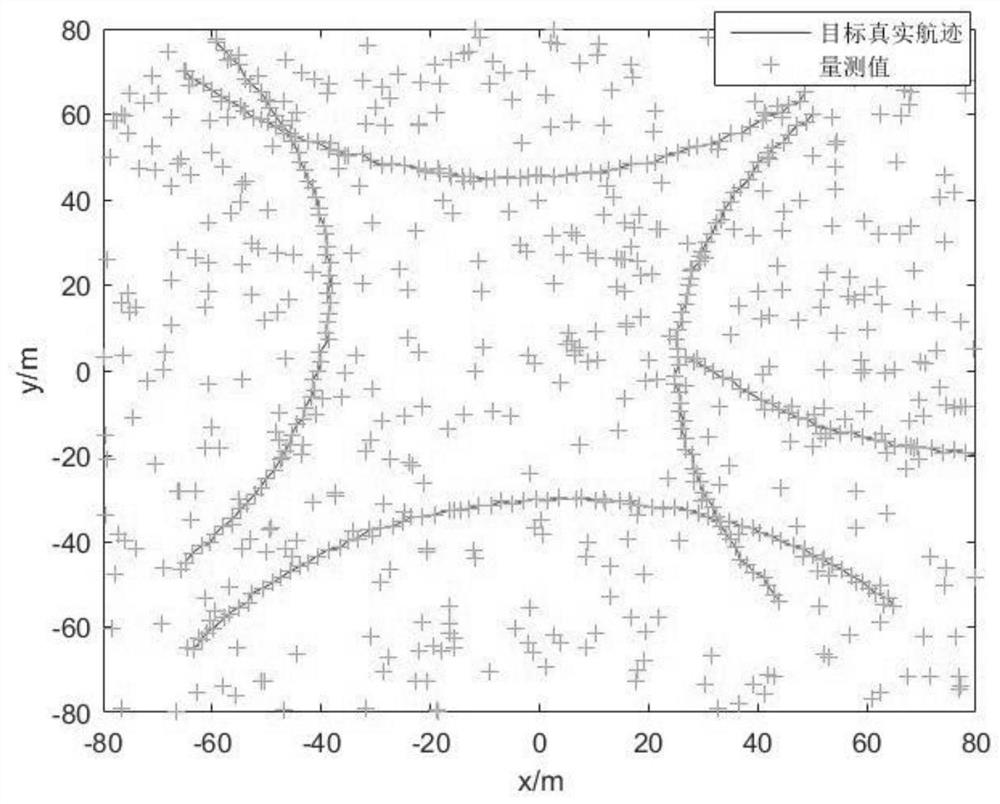
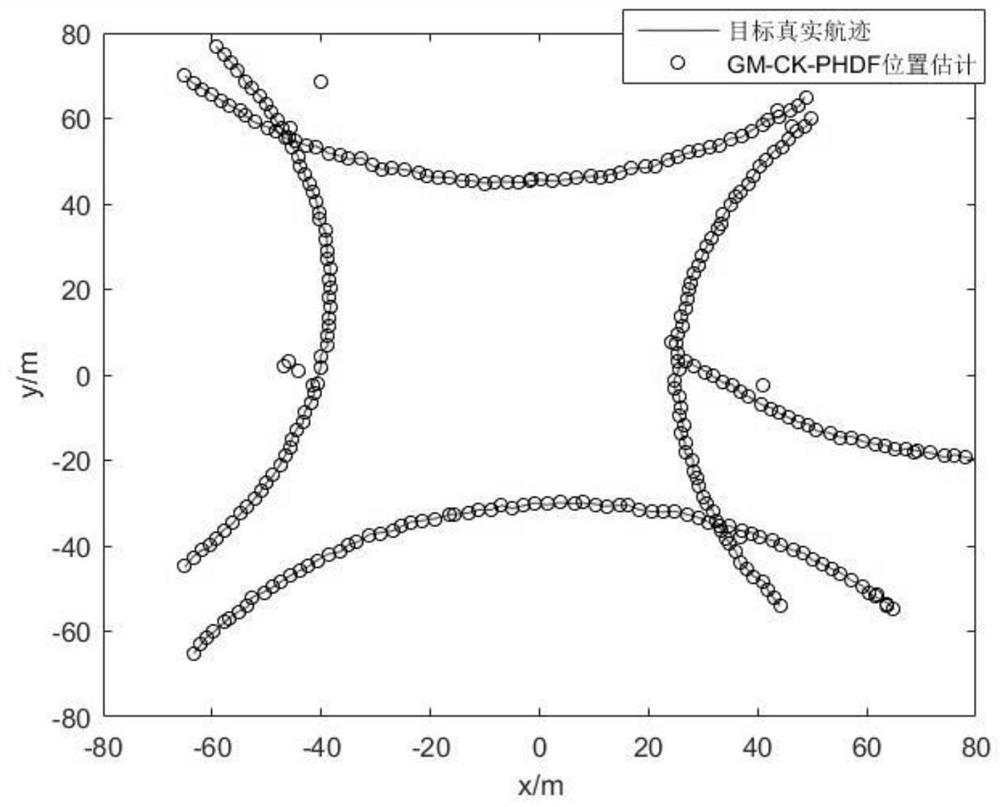
[0094] Use two-dimensional radar to track multiple targets, and use the present invention to predict the state of the multi-target tracking process. In this embodiment, the target performs an approximate uniform turning motion, and its motion equation and radar measurement equation are as follows:
[0095] x k =Fx k-1 +Gw k
[0096]
[0097] where x k is the state variable of the target at time k, the state variable Sampling period t=1s, is the process noise, is the radar measurement distance error, Radar measurement angle error, take σ w =0.2m / s, σ r =0.06m, σ θ = 0.1rad, angular velocity ω = 0.4rad / s; establish a Cartesian coordinate system with the radar as the coordinate origin, x k and are the position and velocity in the X-axis direction, respectively, y k and are the position and velocity in the Y-axis direction, respectively, and Z k is the radar measurement dataset at time k, θ k is the angle measurement value at time k, r k is the distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More