

Bipolar electric coagulation forceps positioning device based on binocular optics and method thereof
A technology of bipolar coagulation forceps and positioning method, which is applied in the field of biomedical engineering, can solve the problems of incomplete tumor resection and bipolar injury in brain functional areas and other important intracranial tissues of patients, and meet the requirements of clinical use and improve The effect of accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
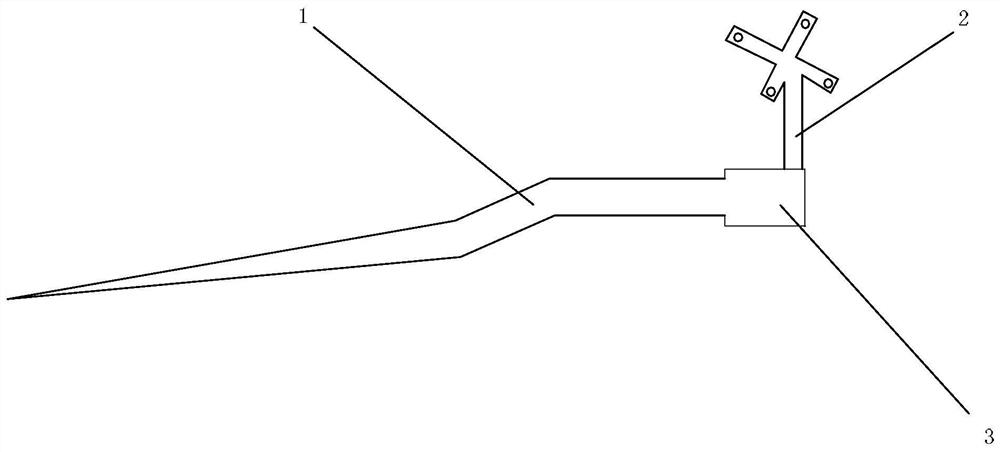
[0049] Specific implementation mode one: combine Figure 1 to Figure 2 Describe this embodiment, a bipolar electrocoagulation tweezers positioning device based on binocular optics described in this embodiment includes a bipolar 1 and a positioning rigid body, and the tail end of the bipolar 1 is provided with a positioning rigid body;
[0050] The positioning rigid body includes a first fixtor2 and a second fixtor3; the upper surface of the first fixtor2 is provided with a groove, the first fixtor2 is directly installed on the fixing seat at the rear end of the bipolar 1 in a wrapping manner, and the bottom of the second fixtor3 is inserted into the upper surface of the first fixtor2 in the groove;
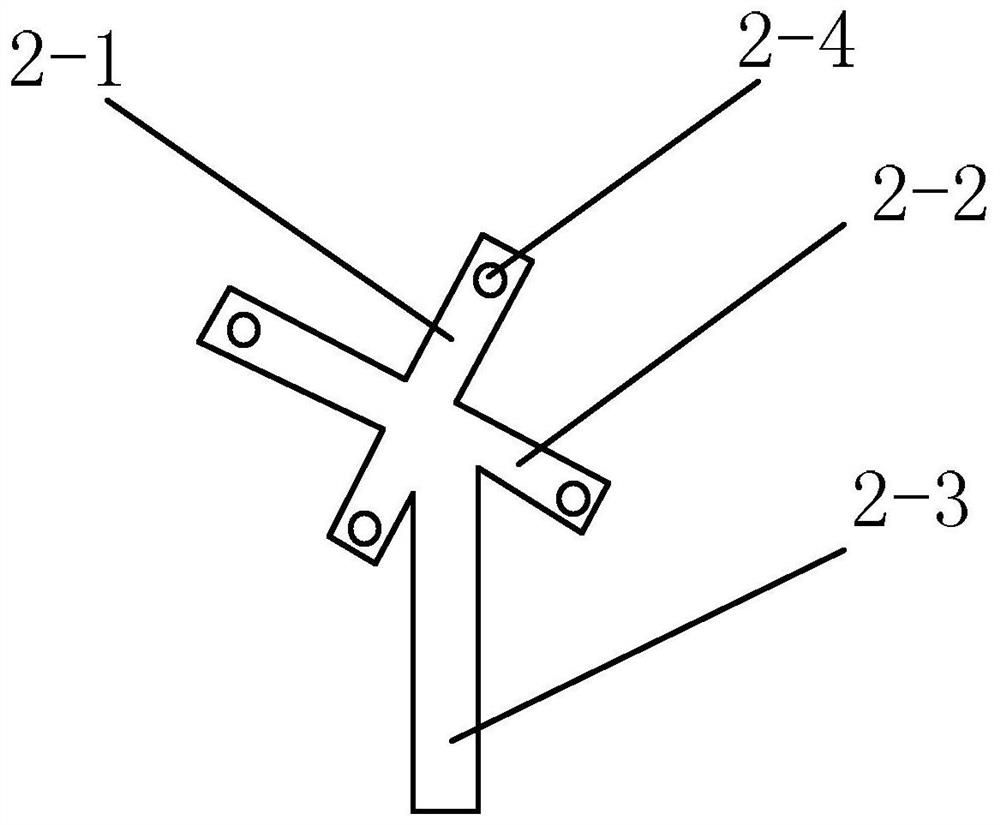
[0051] The second fixtor3 includes No. 1 supporting board 2-1, No. 2 supporting board 2-2, No. 3 supporting board 2-3 and identifier (marker) 2-4; No. 1 supporting board 2-1 and No. 2 supporting board The center of the plate 2-2 is arranged crosswise, the intersection of the No. ...
specific Embodiment approach 2
[0053] Specific implementation mode two: combination Figure 3 to Figure 5 Describe this embodiment, a bipolar coagulation tweezers positioning method based on binocular optics described in this embodiment, its specific steps are as follows;
[0054] Step 1. Construct a coordinate system for the binocular camera, and set the spatial coordinate points of the identifier (marker) 2-4 on the binocular camera to construct the coordinate system;
[0055] Step 2. Based on the coordinate system constructed by the binocular camera, calculate the coordinates of the bipolar tip at the fixed position in the binocular camera coordinate system;
[0056] Step 3. Find the spatial position relationship between the bipolar tip and the marker in the coordinate system constructed by the binocular camera, and calculate the coordinates of the bipolar tip in the local coordinate system of the positioning rigid body;
[0057] Step 4. Using the calculation results of step 3, combined with the positio...
specific Embodiment approach 3
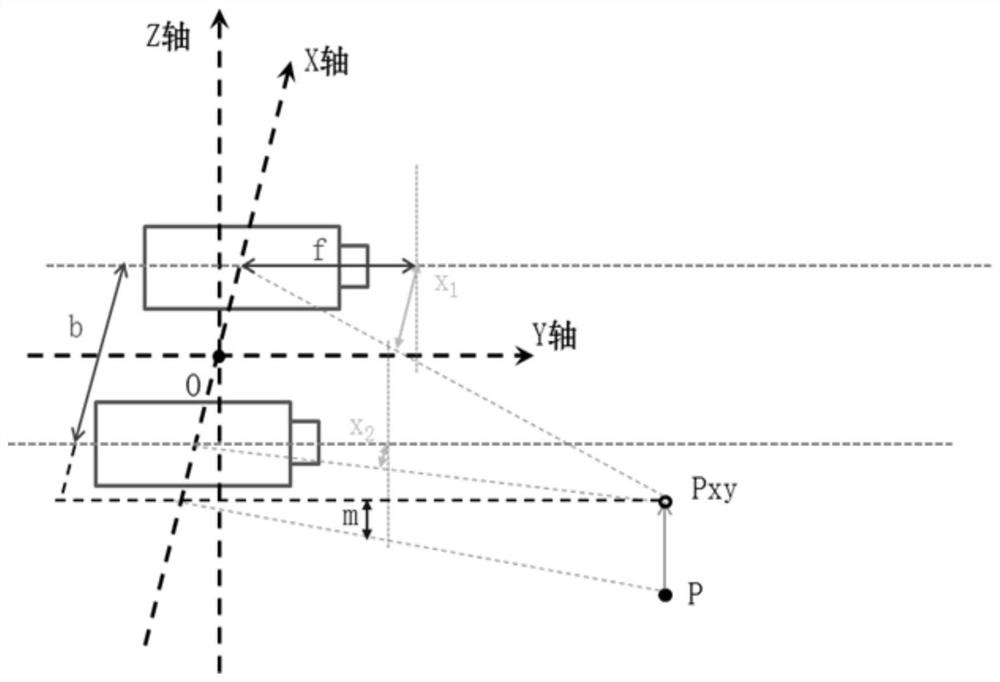
[0059] Specific implementation mode three: combination image 3 Describe this embodiment, this embodiment is a further limitation on the positioning method described in the second specific embodiment, a bipolar coagulation tweezers positioning method based on binocular optics described in this embodiment, the first step In the coordinate system constructed by the binocular camera, and the specific steps of calculating the coordinates of the bipolar tip at the fixed position in the binocular camera coordinate system are as follows:
[0060] Step 11, the optical axes of the binocular cameras are placed in parallel to form a plane, and the distance b and the focal length f between the two cameras are known;
[0061] Step 12. In the plane in step 11, the straight line connecting the centers of the two cameras is the X-axis, and the direction of one lens of the binocular camera is positive; it is perpendicular to the X-axis and is located in the middle of the two optical axes The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More