

Robot precise joint speed reducer
A joint reducer and robot technology, applied in the field of robots, can solve the problems of rigid gear wear, large gyration clearance, unfavorable output precision control, etc., and achieve the effect of improving service life and processing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0065] Aiming at the problems existing in the prior art, the present invention provides a precision joint reducer for robots. The present invention will be described in detail below with reference to the accompanying drawings.
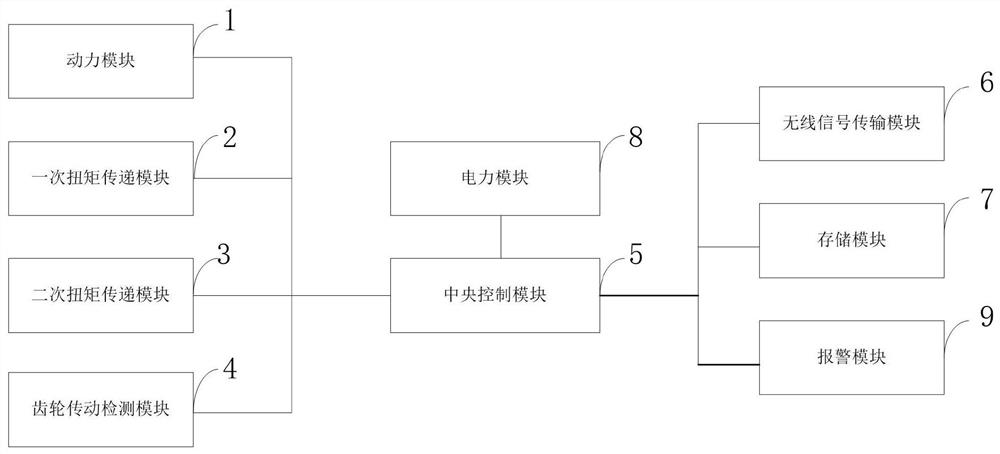
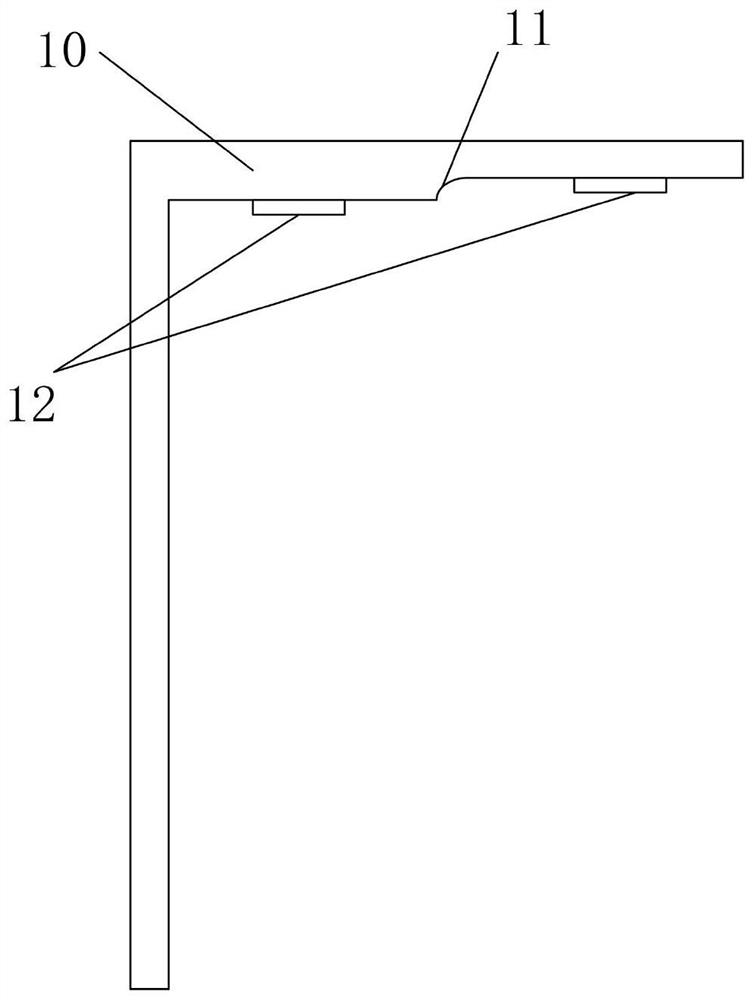
[0066] like figure 1 and figure 2 As shown, the structure of the robot precision joint reducer provided by the present invention specifically includes:
[0067] The power module 1 is connected to the central control module 5 and includes a power wheel, which is used to drive the power wheel to rotate through the motor;
[0068] The primary torque transmission module 2 is connected with the centr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More