Self-learning speed control method based on active observation of load change rate
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A load change and control method technology, applied in engine control, electrical control, fuel injection control, etc., can solve problems such as poor quality of speed control, improve robustness, reduce calibration workload, and avoid control performance degradation Effect
Active Publication Date: 2021-09-10
TIANJIN UNIV
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The purpose of the present invention is to provide a self-learning speed control method based on the active observation of the load change rate in order to solve the problem of poor speed control quality caused by unknown load torque in the engine speed control existing in the prior art
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
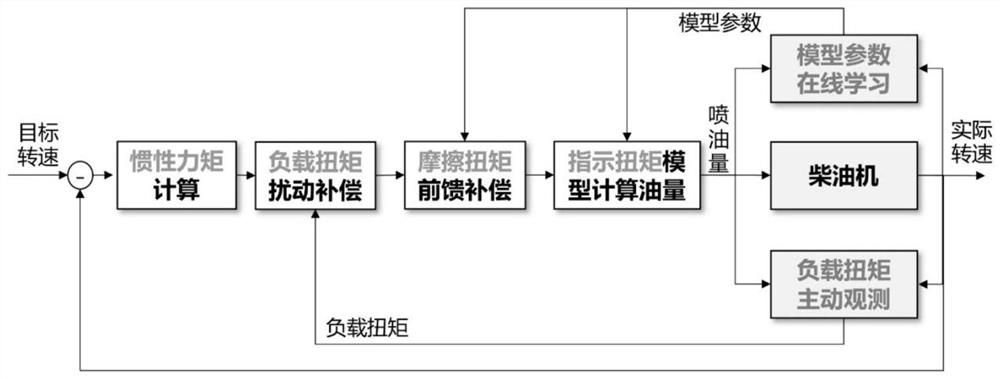
[0045] Based on the engine rotation speed variation rate active load observed self-learning control method, comprising the steps of:
[0046] Step 1, according to the engine rotational speed and the target engine rotation speed deviation of the actual rotation moment of inertia calculations required by feedback control; friction torque is estimated using the current model friction torque, and a friction torque;
[0047] Step 2, the rotational speed of the engine for the dynamic process, based on the dynamic speed, the load torque increases and the load torque variation rate two "expanded state";
[0048] Step 3, using the method of reduced-order extended state observer, in combination with the friction torque, rotation speed, load torque and load torque variation rate online observations to obtain an estimated value of load torque;
[0049] Step 4, step 1 to give the rotational moment of inertia based on the estimated value observed using a 3 step do load torque compensation, to g...
Embodiment 2
[0056] Further, the step 1, the rotational moment of inertia u 0 The calculation method is:
[0057] U 0 = K p (Ω ref -ω) (1)
[0058] Where: ω ref Target engine rotational speed (unit: rpm), ω is the actual engine speed (unit: rpm), the engine may be a diesel engine, k p Is a proportional coefficient, the rotational speed may be adjusted in response to the required speed.
[0059] Further, the differential equation model in Step 2, the engine speed is increased two "expanded state", the rotational speed to obtain a dynamic model with an expanded state:
[0060] Rewrite the equation (2):
[0061]
[0062] Where, ω is the actual engine speed (unit: rpm), Representative derivative of the actual engine speed, J is the moment of inertia of crankshaftrotation system (unit: kg · m 2 ), M i Is indicated torque (unit: Nm), M Fri Is the friction torque (unit: Nm), M load A load torque (unit: Nm).
[0063] To simplify the expression (2), so that As an equivalent load torque, the load...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a self-learning rotational speed control method based on active observation of load change rate, comprising the following steps: step 1, calculating the moment of inertia through feedback control; estimating the current friction torque by using a friction torque model to obtain the friction torque; step 2 , on the basis of the dynamic change of the engine speed, add two "expansion states" of load torque and load torque change rate; step 3, perform online iteration through the observer, and conduct online observation of the speed, load torque and load torque change rate; Step 4, on the basis of the moment of inertia, use the estimated value of the load torque as compensation to obtain the effective torque; superimpose the friction torque in step 1 on the basis of the effective torque to obtain the indicated torque; step 5, through the indicated torque model of the engine The fuel injection quantity is calculated, and the fuel injectioncontrol system controls the speed according to the fuel injection quantity. The cause of the engine speed fluctuation is solved, and the anti-interference ability of the speed control is significantly improved.
Description
Technical field [0001] The present invention relates to an engine speed control technology, and particularly, to a load change rate based on the observation of the active self-learning speed control method. Background technique [0002] Speed control is an important function of the engine control. Quality control for the rotational speed of the engine fuel economy and comfort of the idle condition, the stability of the power generation voltage and power generators, as well as affect ride mode transition hybridsystem significantly. Although the engine speed control is not a new problem, but this problem is unknown load torque has not been a good solution, but also affected the quality control speed. [0003] Proportional - Differential - integral (PID) control is the most common speed control algorithms, in order to ensure quality control at that time, usually require complicated parameter calibration. Robust control is a relatively stable performance controller is also applied...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More