Four-wheel cooperative control method for wheeled robot
A collaborative control and robot technology, applied in the direction of simultaneous control of multiple variables, adaptive control, electric controller, etc., can solve problems such as robot instability, speed, torque or rotation angle inconsistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below with reference to the accompanying drawings and examples.
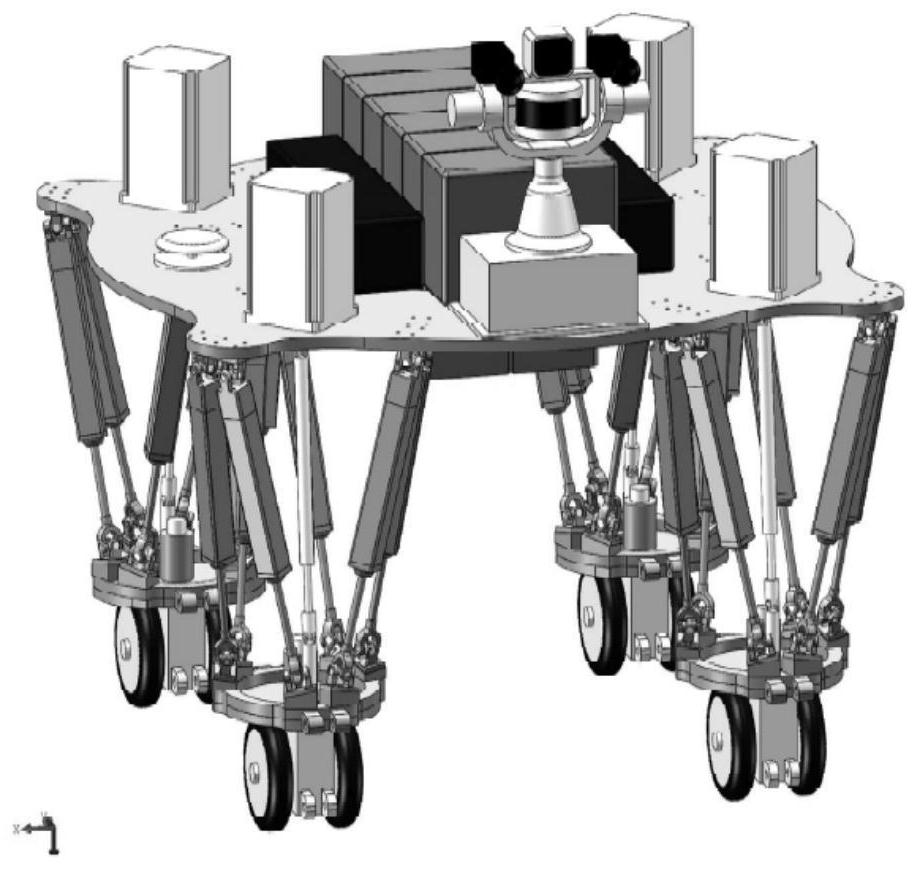
[0057] In this embodiment, an electric four-wheeled robot with independent steering and independent drive is used. The structure of the wheeled robot is as follows: figure 1 shown. Its single-leg structure is an inverted Stewart platform, and each leg is driven and turned independently. It can not only perform wheeled movement to meet the requirements of fast stability, but also can perform footed movement with the advantages of flexibility and strong adaptability.
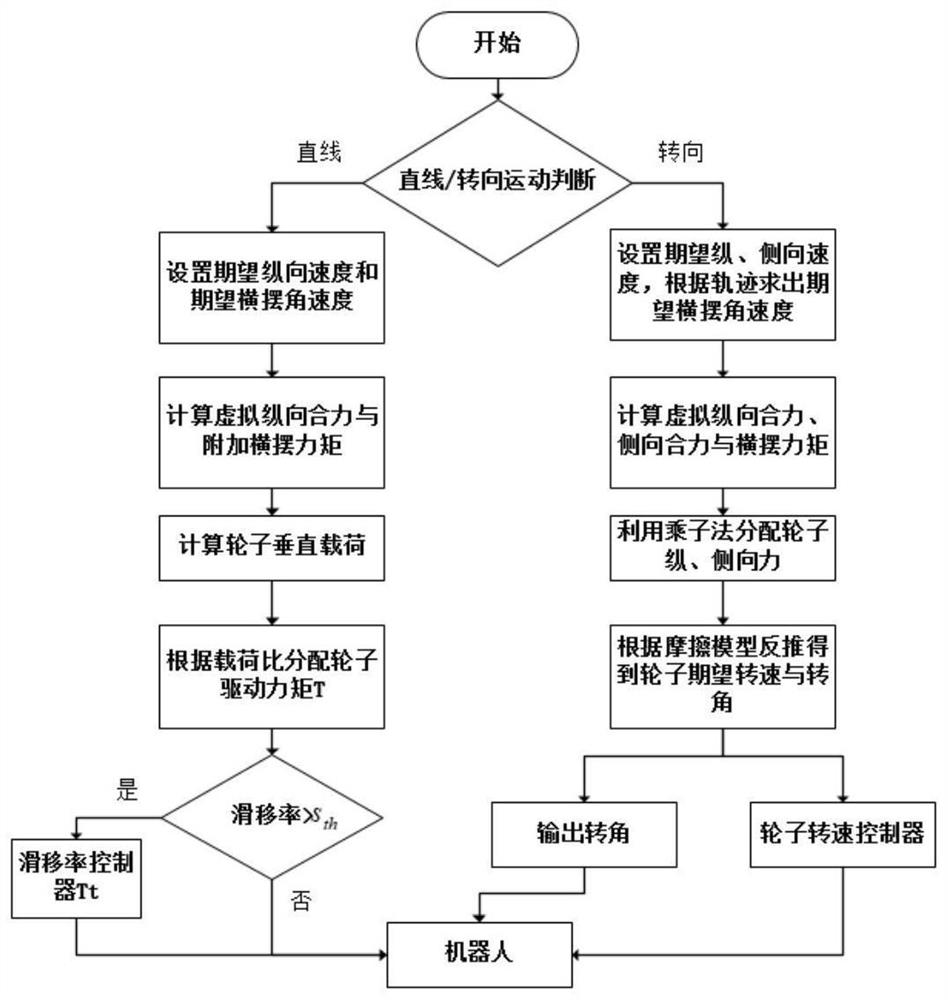
[0058] How to use the method of the present invention to control the four-wheel cooperative work and its functional effects will be described in detail below in conjunction with the accompanying drawings. Such as figure 2 As shown, the present invention provides a four-wheel cooperative control method for a four-wheel independently driven and independently steered wheel-footed robot, which ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More