

Semantic information and vslam fusion method for sweeping robot
A sweeping robot and semantic information technology, applied to manual sweeping machines, geographic information databases, carpet cleaning, etc., can solve problems such as low laser point density, poor stability and accuracy of visual SLAM, single laser data, etc., to strengthen the source of information , improve robustness, improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Hereinafter, embodiments of the present invention will be described with reference to the drawings.
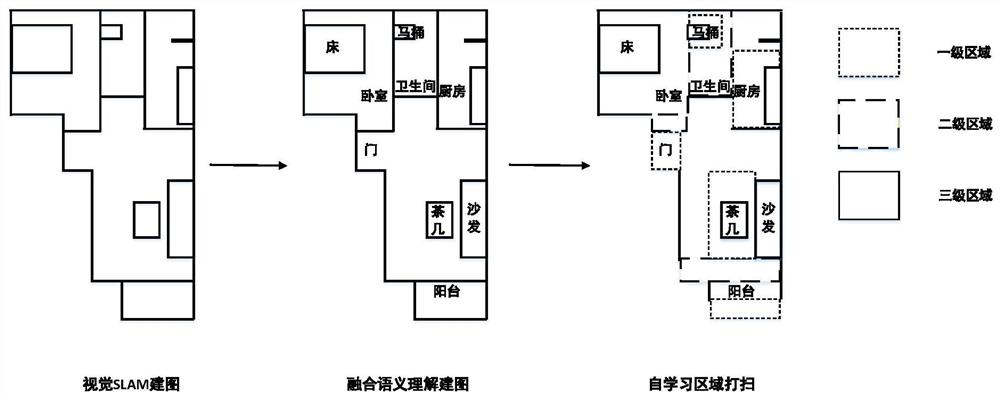
[0044] figure 1 is a schematic diagram of a mapping object in an embodiment of the present invention;
[0045] This embodiment proposes a semantic information and VSLAM fusion method for sweeping robots, including the following steps:
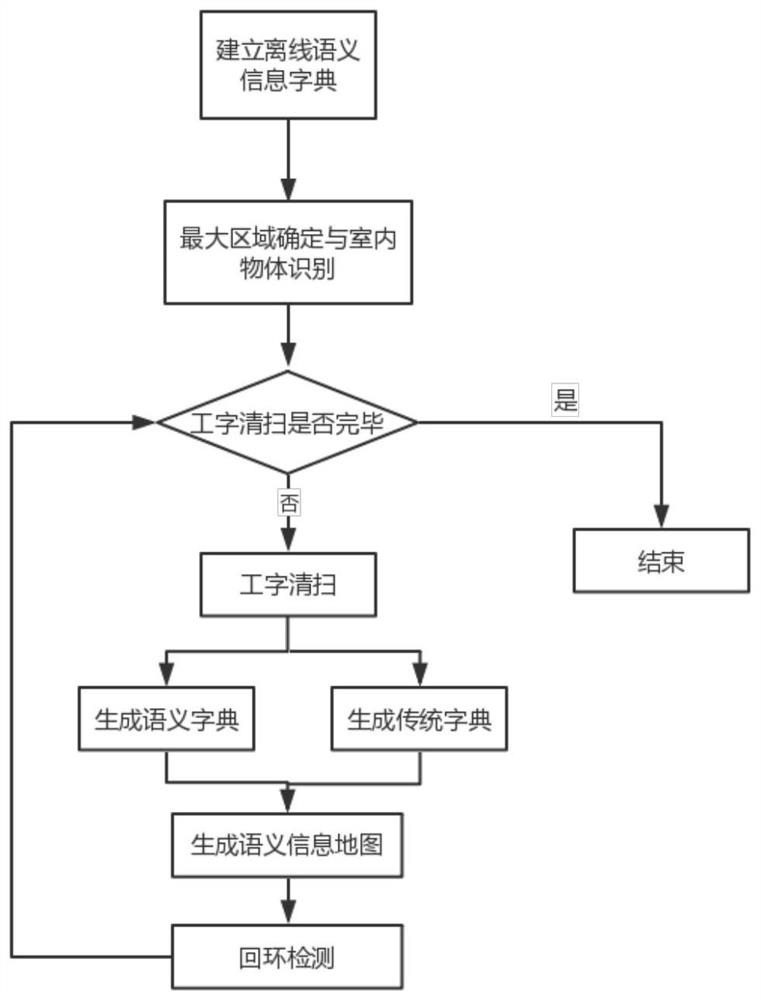
[0046] S1. Integrate semantic information into the VSLAM system to establish an indoor map that integrates semantic information. The map construction algorithm based on semantic information is as follows: figure 2 shown, including the following specific steps:
[0047] S11. Extracting semantic information and identifying the semantic information;
[0048] S111. Since the existing classification model can better extract and identify semantic information, the embodiment of the present invention uses ResNet-18 as the basic network based on the existing classification model, removes the last fully connected layer, and implements semantic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More