Visual navigation method for intelligent trolley
An intelligent car, visual navigation technology, applied in the field of robotics, can solve the problems of low matching accuracy, weak image texture, slow matching speed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
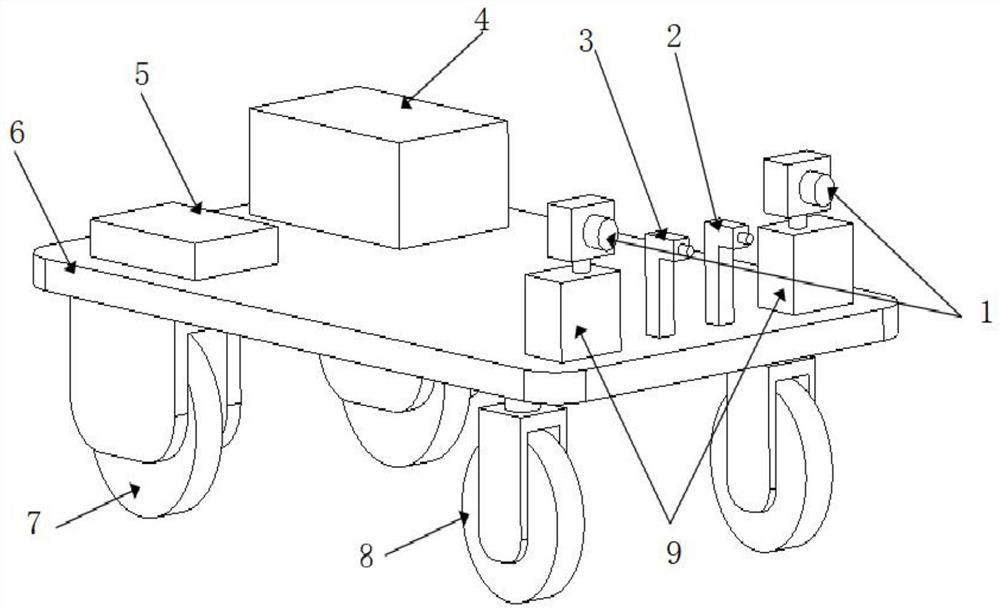
[0071] Such as figure 1 As shown, the smart car includes a power module 4, a controller 5, a vehicle body 6, a driving wheel 7, a guide wheel 8, a steering gear 9, a navigation positioning device 11, and an obstacle avoidance device 12. Four wheels are installed at the bottom of the vehicle body 6, two Two driving wheels 7 are installed at the rear for driving the trolley, and two guide wheels 8 are installed at the front for steering; the power module 4 is a lithium battery for providing electric energy; the navigation and positioning device 11 includes 2 cameras 1 and 2 steering gears 9, the steering gear 9 is arranged at the front of the vehicle body 6, the camera 1 is placed on the steering gear 9, and the steering gear 9 drives the camera 1 to rotate; the obstacle avoidance device 12 includes a laser The range finder 2, the ultrasoni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More