

Unmanned aerial vehicle obstacle avoidance flight method based on digital space slices
A digital space and UAV technology, applied in the direction of instruments, adaptive control, three-dimensional position/channel control, etc., can solve problems such as difficult classification, ineffective effects, and difficult small UAVs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
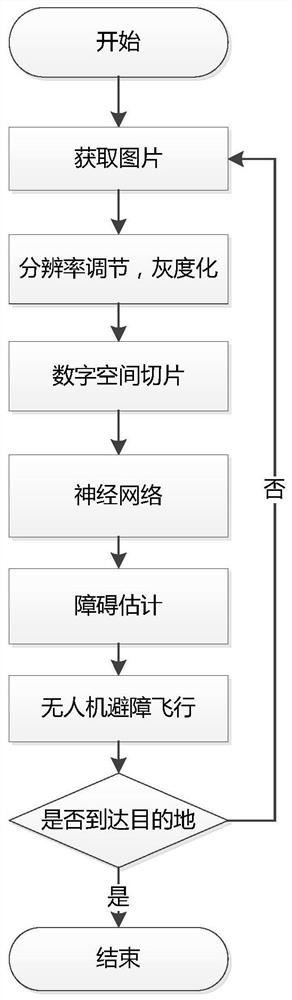
[0038] Such as figure 1 As shown, the UAV obstacle avoidance flight method based on digital space slice in the embodiment of the present invention includes the following steps:
[0039] Step 1: Obtain the picture information of the environment where the camera is currently shooting.
[0040] Step 2: Preprocess the picture, adjust the size of the picture, suitable for digital space slicing; at the same time, perform gray-scale processing on the picture; obtain the picture Img.
[0041] Step 3: The size of the picture obtained in Step 2 is a resolution of 600x600, and the digital spatial slicing algo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More