GPS unmanned aerial vehicle control method
A control method and unmanned aerial vehicle technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve problems such as communication constraints of unmanned aerial vehicle formation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings.
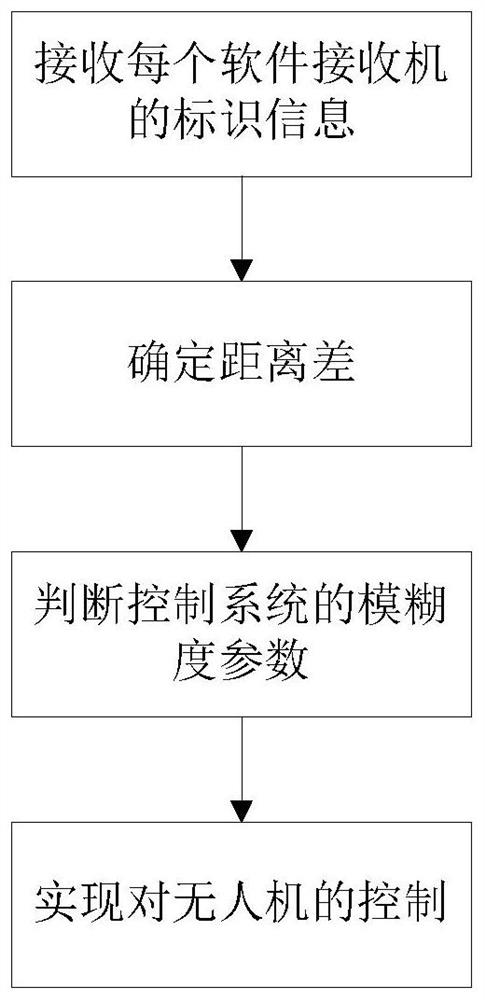
[0067] A GPS unmanned aerial vehicle control method, comprises the steps:
[0068] (1) The control system receives the identification information of each software receiver, and receives the time when each software receiver sends the control signal to the UAV controller;
[0069] (2) calculate any two software receivers and receive the estimated value of the clock of the control signal, collect the electromagnetic wave propagation speed and determine the distance difference between the UAV controller and the corresponding two software receivers;
[0070] (3) Judging the ambiguity parameters of the control system with the momentum information of any two software receivers;
[0071] (4) Taking the ambiguity parameter as input and taking the position information of the UAV controller as output, the convolutional neural network is trained to obtain the position information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com