

Robot-assisted fracture space collision-avoidance reduction path planning method
A robot-assisted and path planning technology, applied in the field of robotics, can solve problems such as the inability to effectively obtain space collision avoidance paths, and achieve the effect of avoiding contact collisions and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
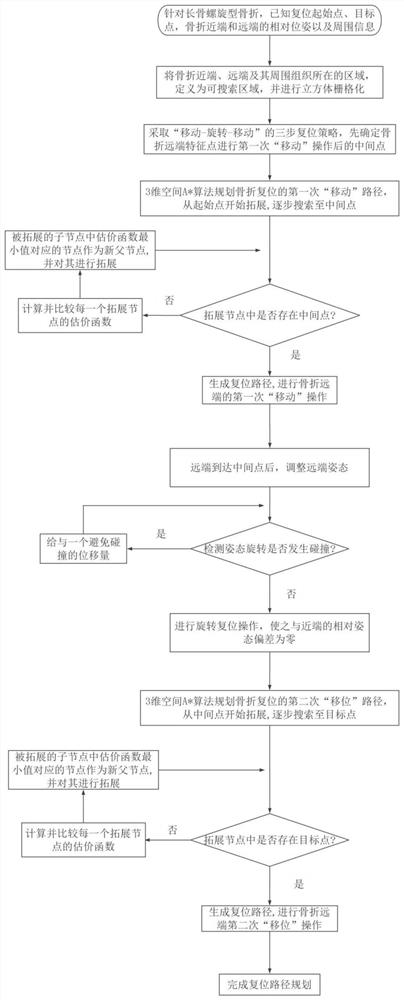
[0046] see Figure 1-Figure 9 , a robot-assisted fracture space collision avoidance reset path planning method, for spiral fractures of long bones, according to the bone image registration of the healthy side, the displacement deviation and rotation deviation of the fracture are determined, the proximal end of the fracture is firmly fixed, and the distal end of the fracture is assisted by the robot. With reference to the "stretch-rotation-reset" technique used by orthopedic surgeons in actual fracture operations, the robot-assisted long bone spiral fracture reduction operation process is decomposed into three parts: "move-rotate-move". step:
[0047] 1) "Move" reset:
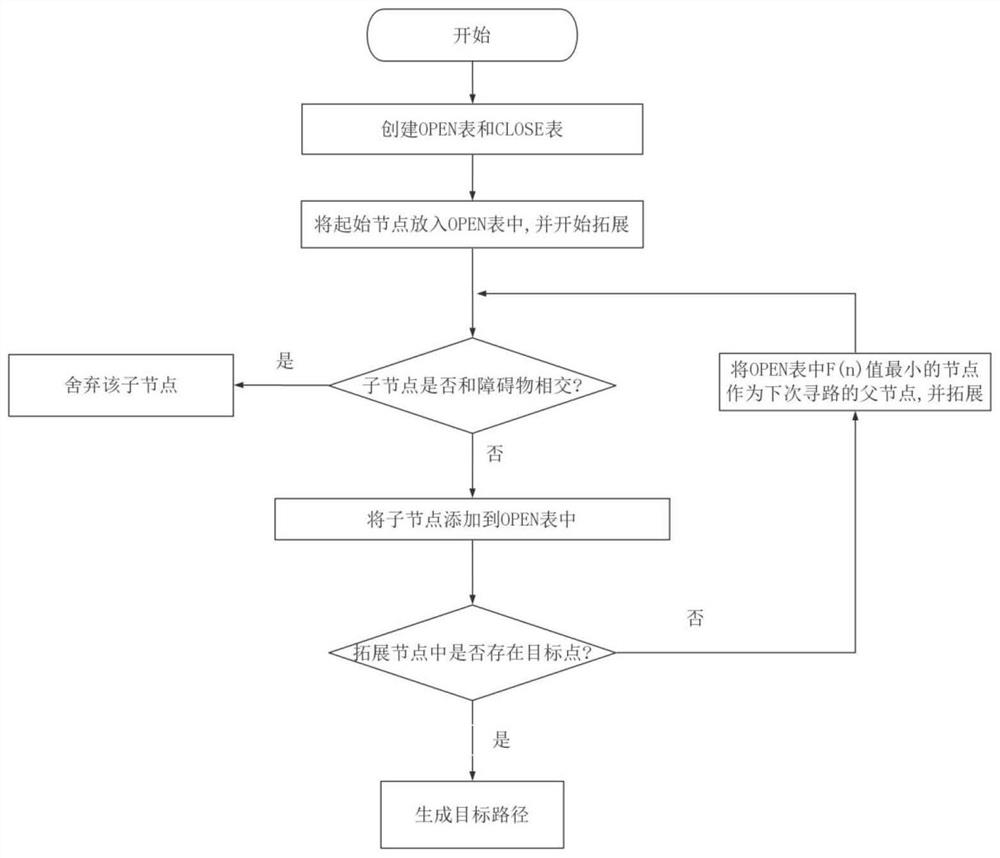
[0048] The A* algorithm in three-dimensional space is used for planning, and during the reset process, follow the reset path planned in three-dimensional space to avoid obstacles that may appear on the reset path;
[0049] 2) Rotation attitude adjustment:
[0050] When the distal end of the fracture moves to ...
Embodiment 2
[0054] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0055] Before the fracture reduction path planning, a registration algorithm based on the bone image of the healthy side is used, and Mimics and Geomagic studio software are used to determine the spatial position deviation and posture deviation of the distal end of the fracture relative to the proximal end, and through the CT scan data, in the Mimics software Reverse reconstruction generates a 3D digital model of the distal end, proximal end, and healthy bone of the fracture, uses the "Mirror" function in Mimics software to generate a mirror image of the healthy bone, and uses the mirrored healthy bone as a benchmark to align the proximal fracture with it. After registration and fixation, import the 3D digital model including the distal end, proximal end and healthy bone of the fracture into Geomagic studio software, select the distal feature point as the origin of the refer...
Embodiment 3
[0057] This embodiment is basically the same as the above-mentioned embodiment, and the special features are as follows:
[0058] The reset adopts the A* algorithm in three-dimensional space to carry out path planning, and the specific operation steps of the step 1) "moving" reset are:
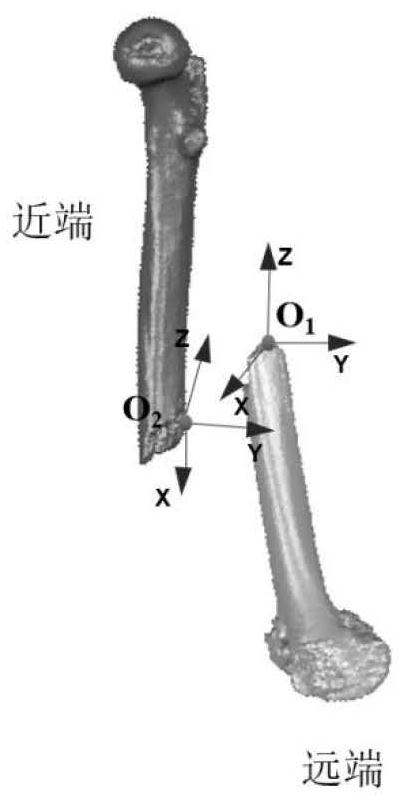
[0059] (1) The spatial positions of the proximal and distal ends of the fracture are known, represented by the position of a certain feature point on the proximal and distal ends respectively, and the attitude of the proximal and distal ends of the fracture relative to the set reference reference coordinate system, The position and shape of obstacles, etc.; set the starting point of reset path planning as O 1 , the target point is O 2 ;
[0060] (2) First, determine the middle point O of the distal end of the fracture after the first "move" operation mid , the middle position should avoid collision between the distal end and the surrounding biological tissues during the subsequent posture a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More