

Unmanned aerial vehicle auxiliary resource allocation method based on deep reinforcement learning
A technology of reinforcement learning and resource allocation, applied in the field of resource allocation optimization, can solve the problems of computing task time delay and high energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
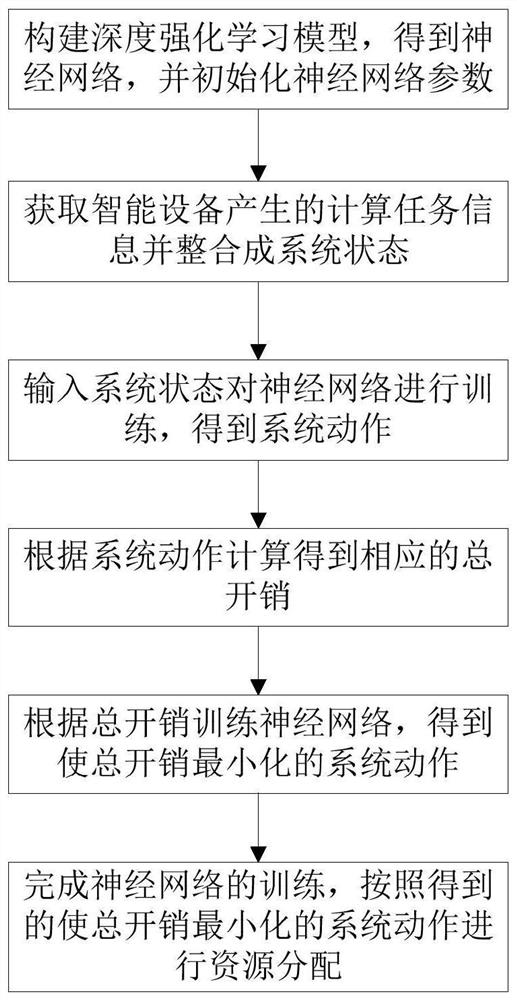
[0080] like figure 1 As shown, a UAV-assisted resource allocation method based on deep reinforcement learning includes the following steps:
[0081] S1: Construct a deep reinforcement learning model, obtain a neural network, and initialize neural network parameters;
[0082] S2: Obtain the computing task information generated by the smart device and integrate it into the system state S t ;
[0083] Among them, t represents the decision time slot;
[0084] S3: Input system state S t Train the neural network to get the system action A t ;
[0085] S4: Action A according to the system t Calculate the corresponding total cost C total ;
[0086] S5: According to the total cost C total Train the neural network to obtain system actions that minimize overhead;
[0087] S6: Complete the training of the neural network, and allocate resources according to the obtained system actions that minimize the total overhead.
[0088] In the implementation process, the deep reinforcemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More