

Sealing body and insulating pad, ceramic core assembly manipulator, system and method based on six-axis robot
A six-axis robot and insulating pad technology, applied in sorting and other directions, can solve the problems of false positive and negative sides of insulating pads/porcelain cores, misjudgment of qualification, high labor intensity, unstable manual assembly, etc., to achieve low cost and work. High efficiency and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The content of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
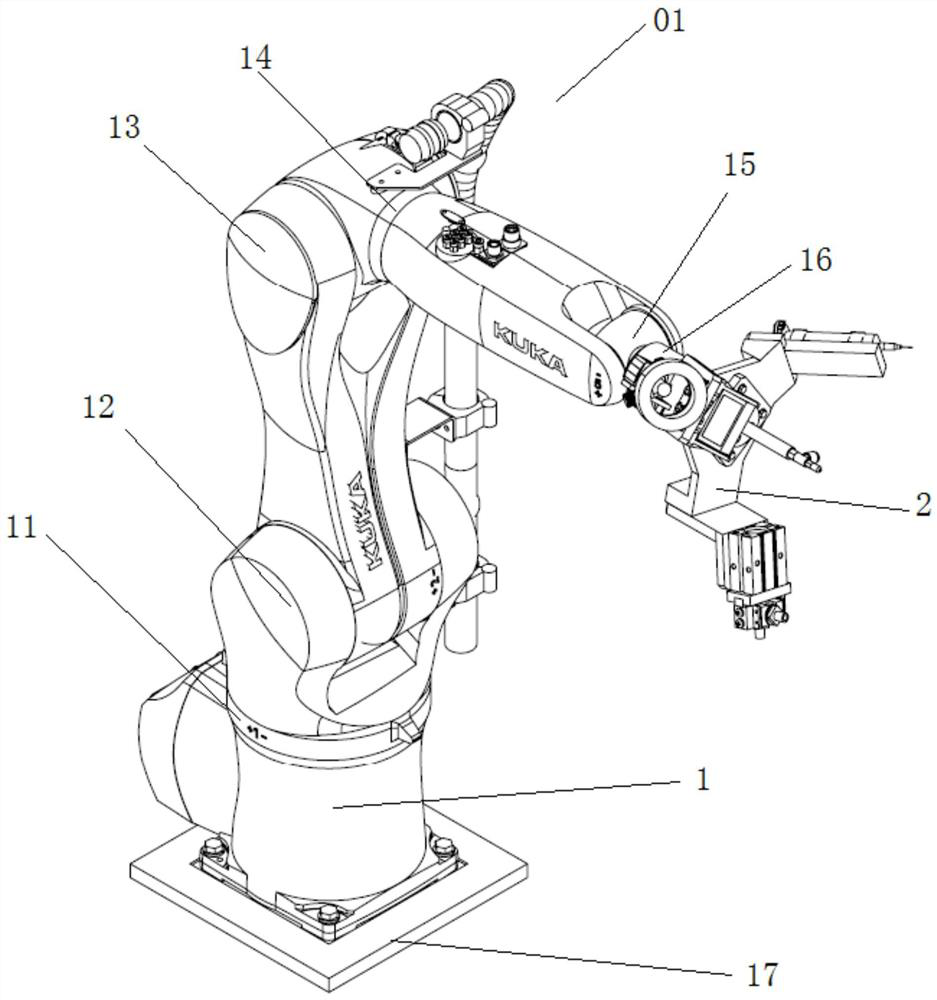
[0088] Such as figure 1 As shown, a sealing body, insulating pad, and ceramic core assembly manipulator based on a six-axis robot, including a base, a six-axis robot 1 set on the base, and a glue injection jig assembly set on the working axis of the six-axis robot 1 2. The six axes of the six-axis robot 1 are the first axis 11 , the second axis 12 , the third axis 13 , the fourth axis 14 , the fifth axis 15 and the working axis 16 .
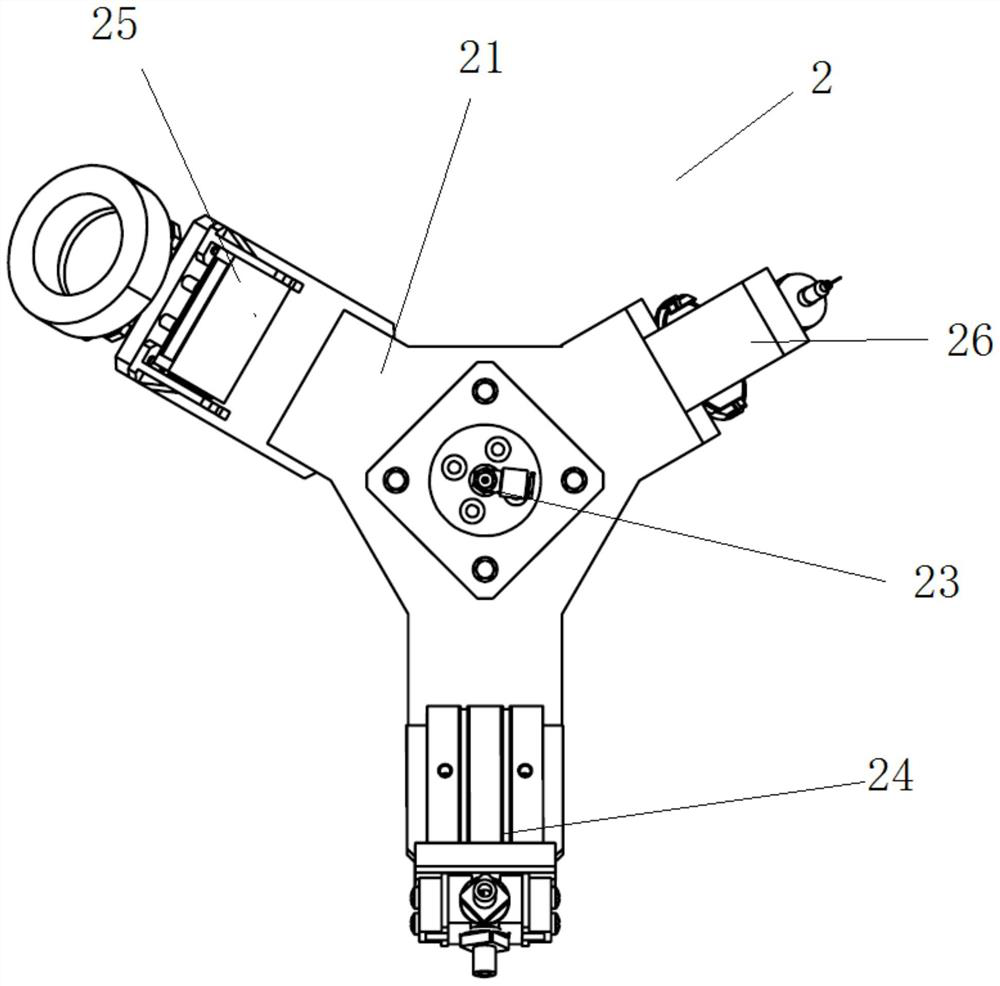
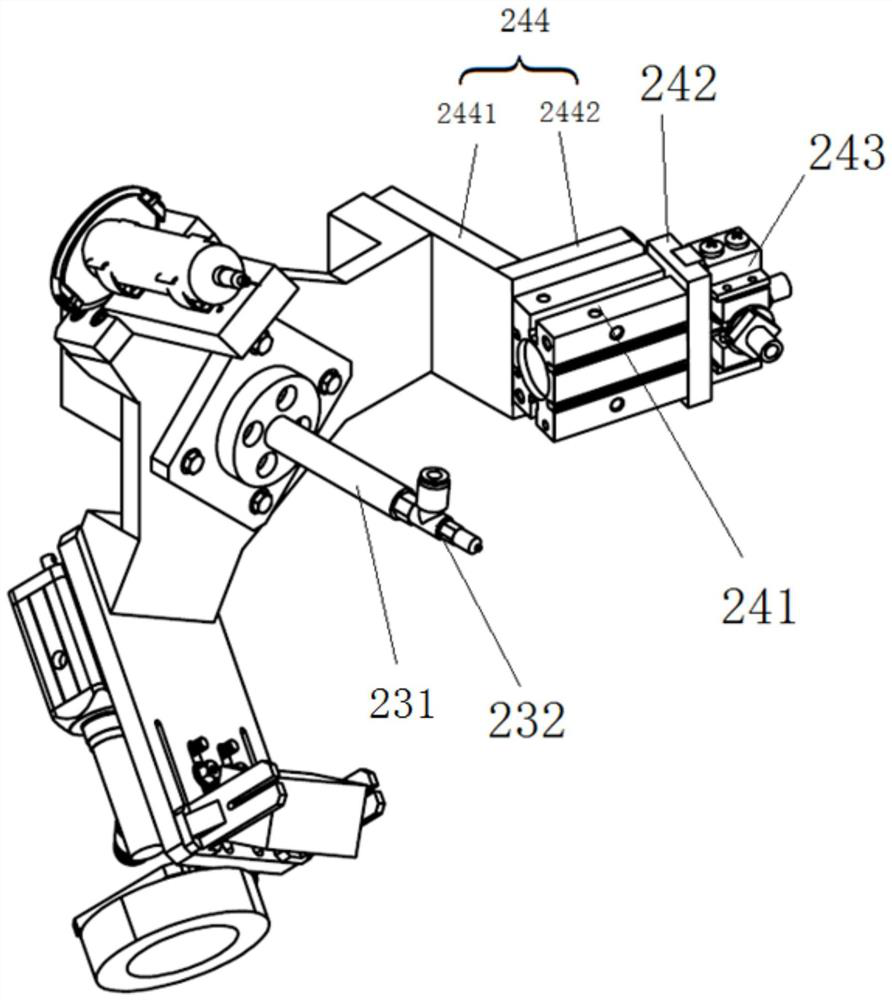
[0089] Such as Figure 2 to Figure 4As shown, the glue injection fixture assembly 2 includes a glue injection fixture connecting plate 21, a connecting flange 22 connected to the glue injection fixture connecting plate 21, a suction fixture 23, a sealing body grasping fixture 24, a visual system 25. Gluing system 26; the connecting flange 22 is located in the middle of the upper surface ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More