

A multi-body collaborative omnidirectional mobile intelligent robot system
An intelligent robot, omnidirectional mobile technology, applied in aircraft parts, ground installations, transportation and packaging, etc., can solve the problems of large additional force of the aircraft, release the wheel freely, and increase the load of the car body and meet the functional requirements. , the effect of improving exercise flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
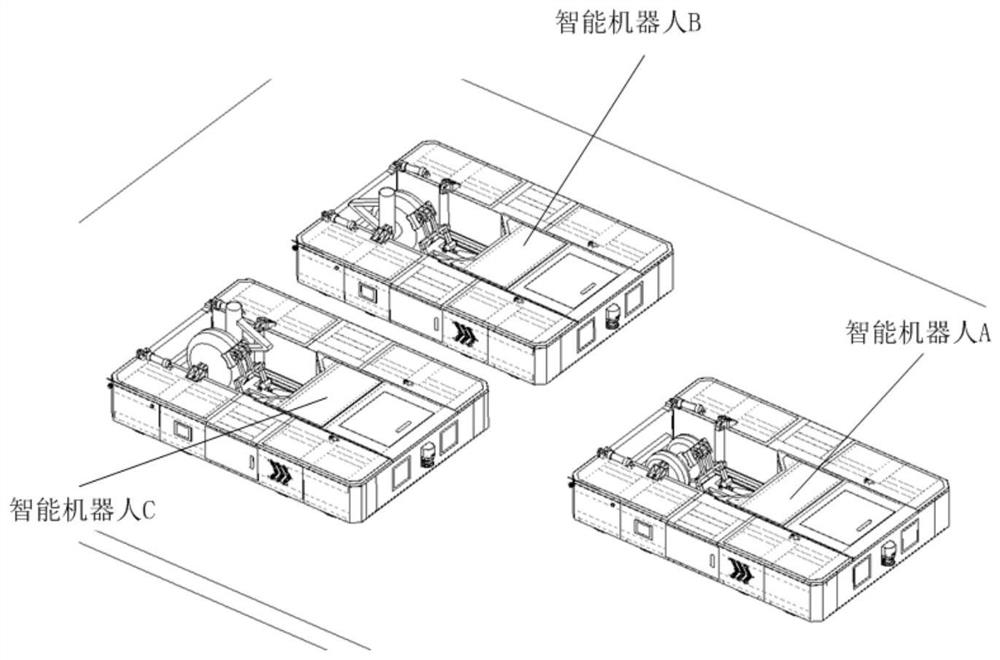
[0046] Such as figure 1 As shown, a multi-body collaborative omnidirectional mobile intelligent robot system includes three omnidirectional intelligent robots, named intelligent robots ABC, intelligent robot A is used to clamp the front wheel of the aircraft, and intelligent robot BC is used to clamp the rear wheel of the aircraft . The three intelligent robots are all driven by mecanum wheels, so as to realize the omnidirectional movement of the system.
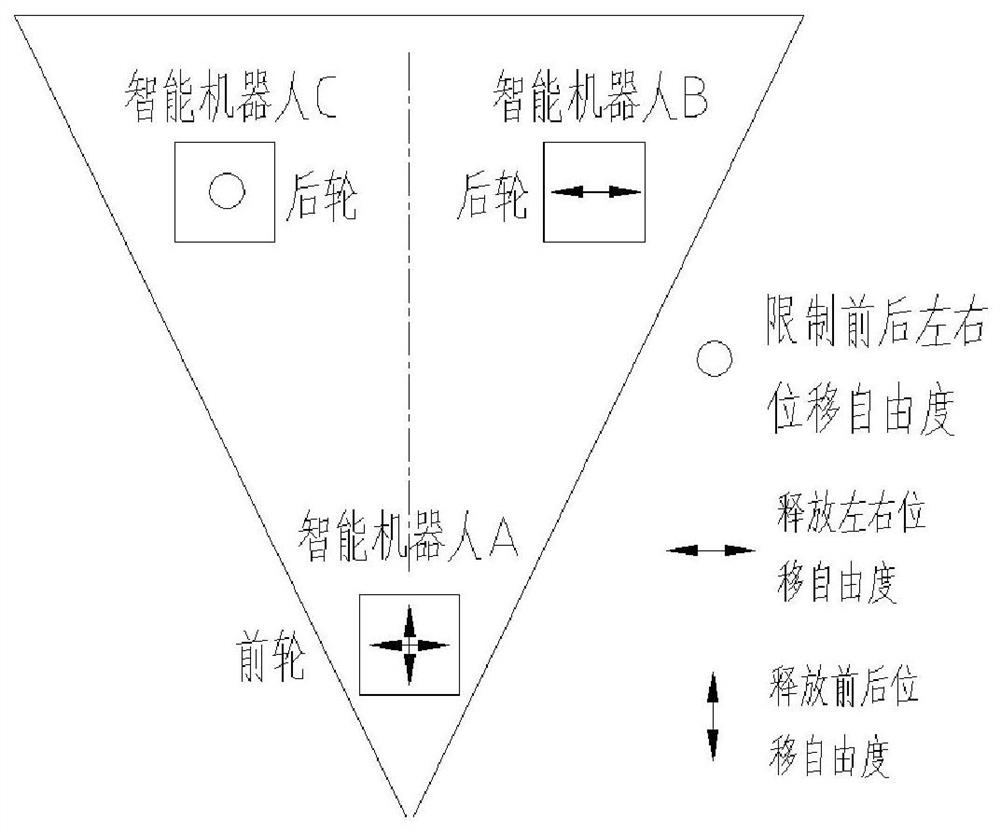
[0047] Such as figure 2 As shown, in the process of three intelligent robots cooperating to transfer the aircraft, it should be ensured that the wheels of the aircraft can be firmly fixed on the intelligent robot, and at the same time, the wheels should be allowed to move slightly relative to the intelligent robot in certain directions to prevent the intelligent robot from going over the hurdle. When crossing a ditch or turning, a large additional force is generated on the product. Therefore, intelligent robot A should r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More