

Self-adaptive fuzzy force tracking control method based on multi-robot cooperative operation
An adaptive fuzzy, multi-robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of increasing difficulty in force control, difficulty in establishing a perfect environment, etc., to improve response speed, shorten response time, reduce The effect of the conditions on which the algorithm is applied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
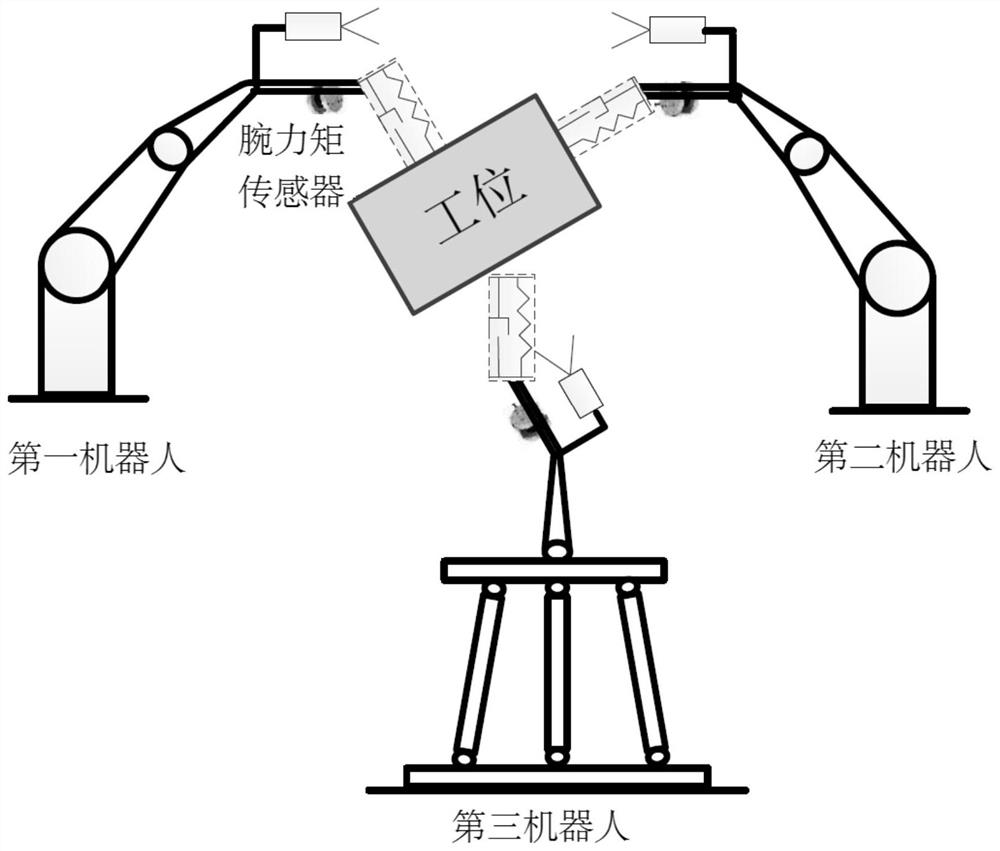
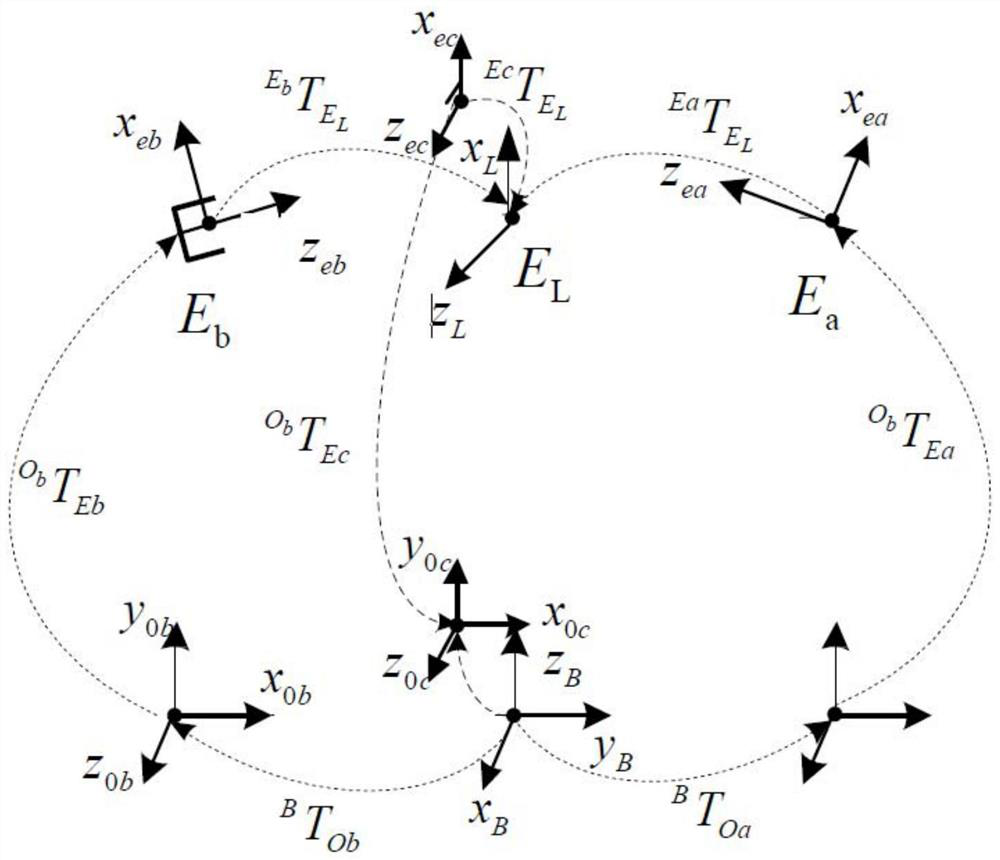
[0063] An adaptive fuzzy force tracking control method based on multi-robot cooperative operation, such as Figure 1-3 shown, including the following steps:
[0064] Step 1: According to the position information of the target operator, according to the position constraints formed by the closed chain, the constraint equations of the coordinated position of the end of each robot are obtained respectively, so as to obtain the expected pose of the end of each robot;
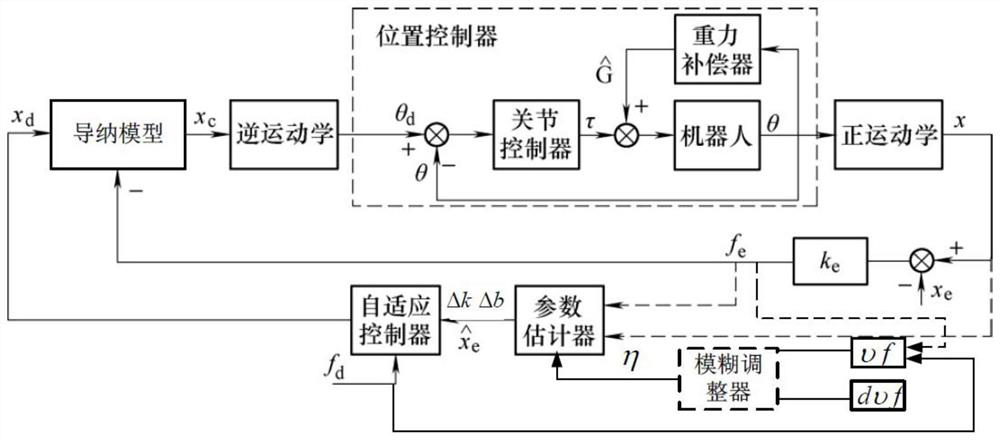
[0065] Step 2: Solve the inverse kinematics according to each robot, obtain the joint rotation angle control commands required for the coordinated operation of each robot, and obtain the current expected angle of each joint of each robot itself;
[0066] Step 3: Establish the admittance control model, equate the force at the end of each robot to the input position, and equate the force error at the end of each robot to the attitude increment, and perform force tracking control of multiple robots;
[0067] Step 4: In...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More