

Dynamic environment offline visual odometer expanding method
A visual odometry, dynamic environment technology, applied in computing, computer components, image analysis, etc., can solve problems such as complex descriptors and difficult to meet real-time requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0071] The technical scheme that the present invention solves the problems of the technologies described above is:
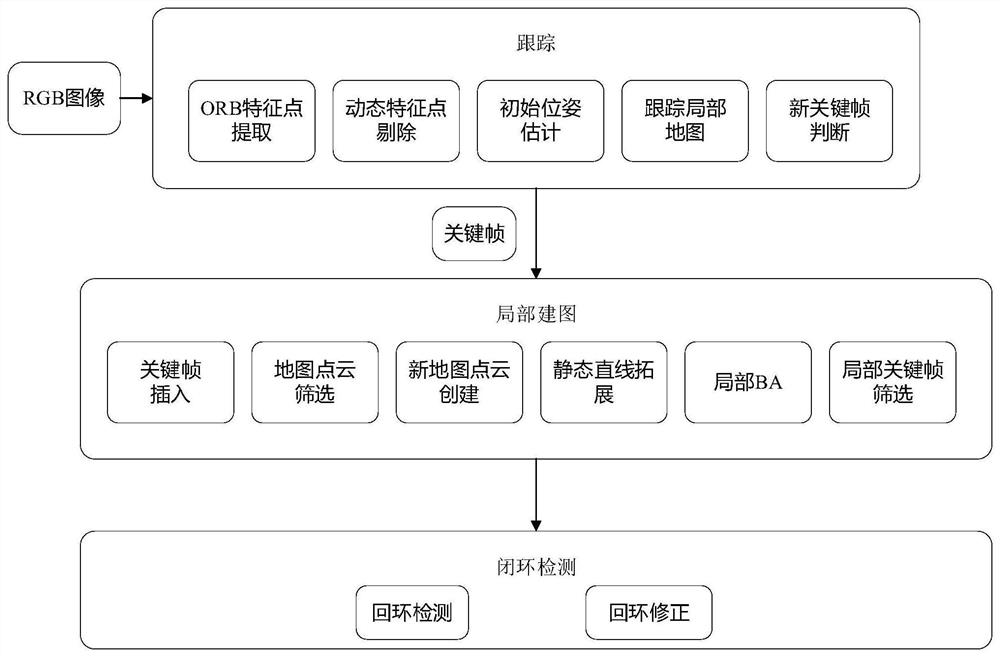
[0072] The main steps of this method are:
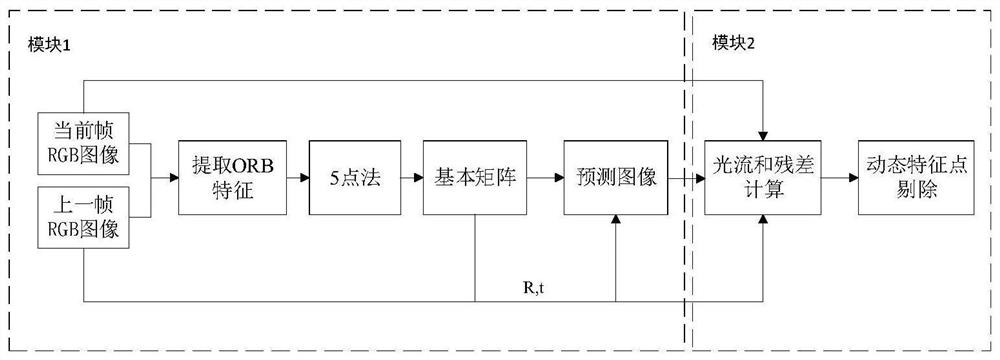
[0073] S1, acquire the robot frame image at time t, and extract the point features of the robot frame image, match the point features to calculate the initial pose matrix, and predict the image at time t from the image at time t-1 based on the initial pose matrix;
[0074] S2, calculate the optical flow and residual value through the image at time t, the image at time t-1 and the predicted image at time t at time t, and eliminate the dynamic feature points to obtain static feature points;
[0075] S3, use the static feature points obtained in S2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More