

AUV error limited anti-interference control method
A control method and error technology, which are applied in the fixed-point operation field of underwater AUV carrying an underwater manipulator to achieve the effect of good operation effect and good suppression ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
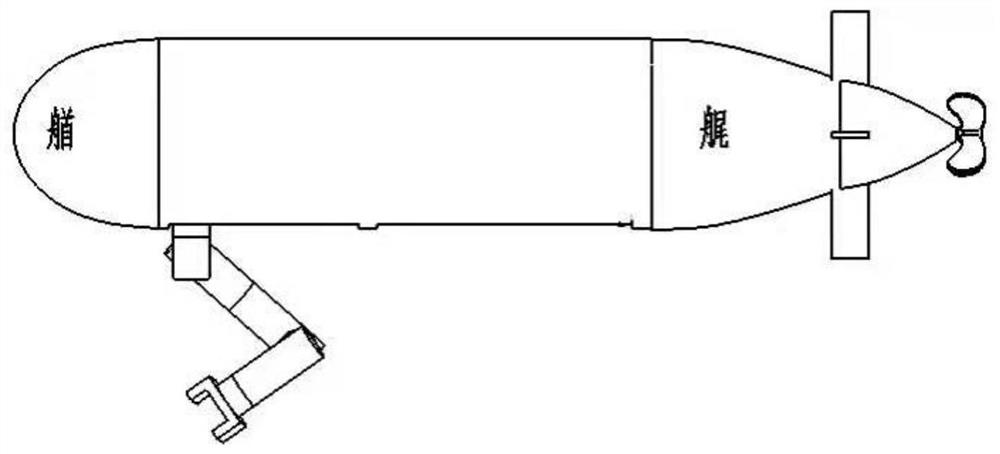
[0057] Implementation 2: as attached figure 2 As shown, the UVMS system is mainly composed of two parts: AUV and underwater robotic arm:
[0058] AUV body: The AUV is torpedo-shaped as a whole, which can effectively reduce the resistance of its water movement. The joint action of the propeller and the cross rudder is used to control the position and attitude of the AUV, because the number of system control variables is 3, but its freedom of movement The degree is 6, so the AUV is an underactuated system.
[0059] Underwater robotic arm: The UVMS system uses a four-degree-of-freedom robotic arm with an end effector as a working tool. The underwater robotic arm consists of four parts: the rotary joints of the waist and wrist, and the swing joints of the upper arm and forearm. The combined rotational motion of the four joints can complete the position and attitude control of the end effector of the underwater manipulator.
[0060] The UVMS system composed of AUV body and under...
Embodiment 3
[0071] Implementation 3: According to step 2, establish a three-dimensional error dynamics model based on the line-of-sight method and set performance, and then estimate the coupling interference of the underwater manipulator to the AUV body through the Newton-Euler method.
[0072] AUV related parameters are described as follows:
[0073]
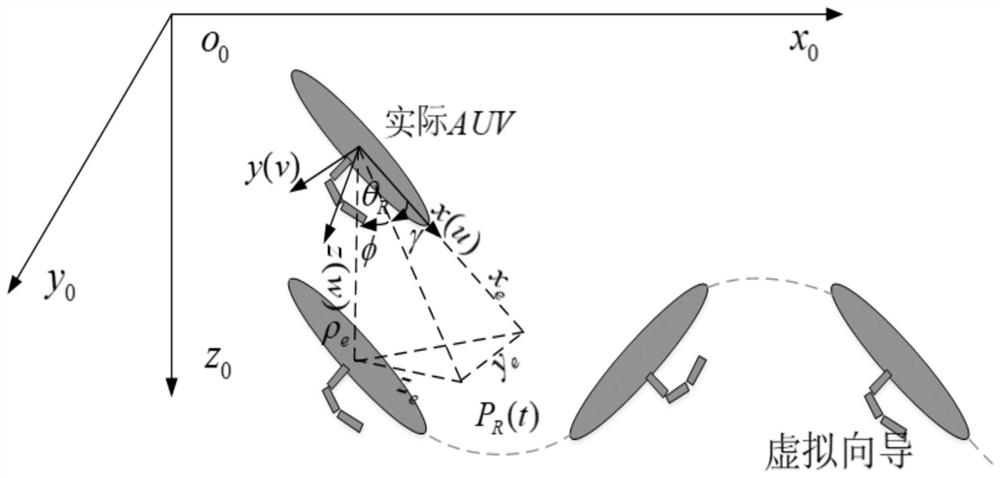
[0074] as attached image 3 As shown, the position error of AUV tracking (x e , y e and z e ) and the tracking error of the AUV based on the virtual guide (ρ e , γ and φ) have the following geometric relationship:
[0075] x e =ρ e cosφcosγ
[0076] the y e =ρ e cosφsinγ
[0077] z e =ρ e sinφ
[0078] For the convenience of design, the distance and attitude errors of the actual AUV and the virtual guide in inertial coordinates can be converted to the AUV carrier coordinate system:
[0079]
[0080] Deriving it:
[0081]
[0082]
[0083]
[0084] For convenience of representation, define α 1 , a 2 and α 3 : ...
Embodiment 4
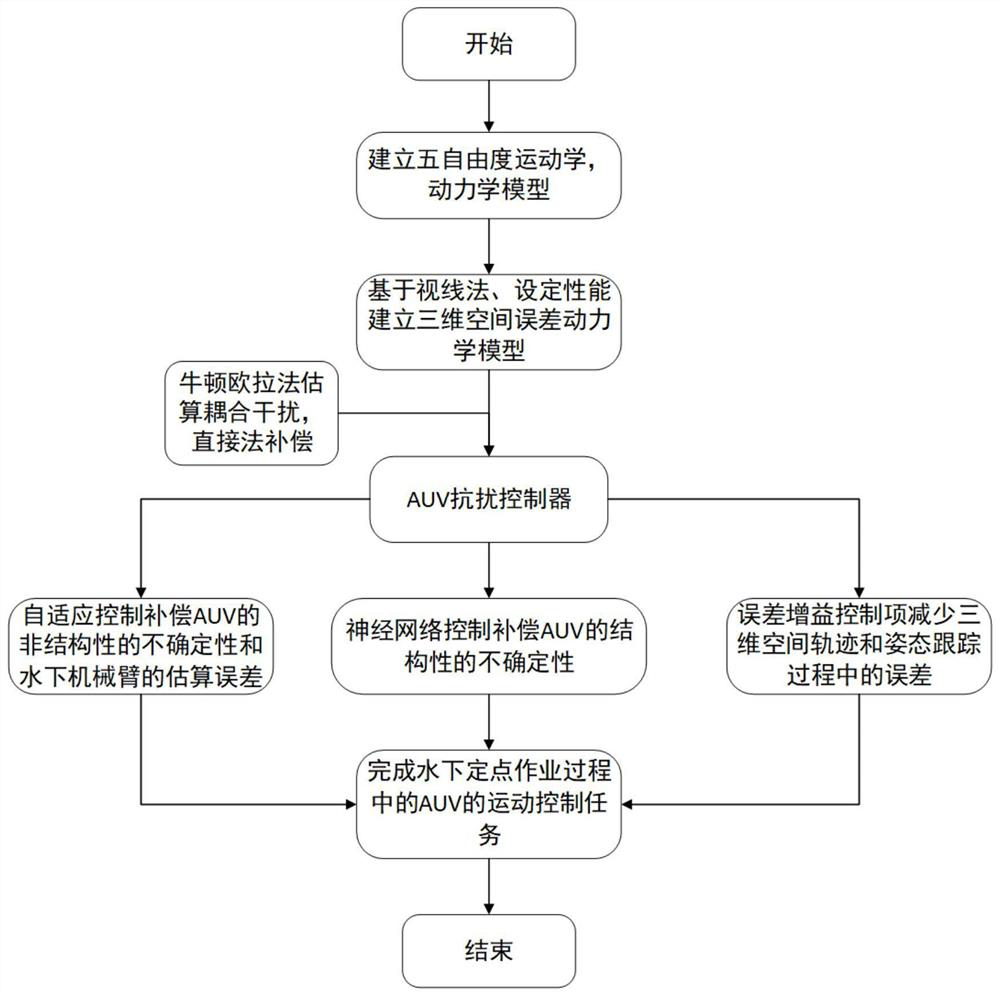
[0184] Implementation 4: The block diagram of the AUV anti-interference controller is attached Figure 4 Show. According to the task requirements of AUV in the process of underwater fixed-point operation, based on the implementation of the three-dimensional AUV error dynamic equation established by the line-of-sight method and the set function and the Newton-Euler (Newton-Eular) formula to derive the underwater The disturbance torque of the robotic arm to the AUV body is directly compensated in the AUV disturbance rejection controller. The AUV disturbance rejection controller consists of error control items, neural network control items, adaptive control items and manipulator coupling disturbance estimation items. The error control term is used to reduce the tracking error during the movement of the AUV. The manipulator coupling interference estimation term compensates the interference of the manipulator to the AUV body in real time. The neural network control term compensate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More