

Method for evaluating rehabilitation condition of leg patient and walking aid robot
A walking aid robot, leg technology, applied in the direction of instruments, complex mathematical operations, computer parts, etc., can solve the problems of inconvenience, inconvenient monitoring of human movement, inaccurate analysis results, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
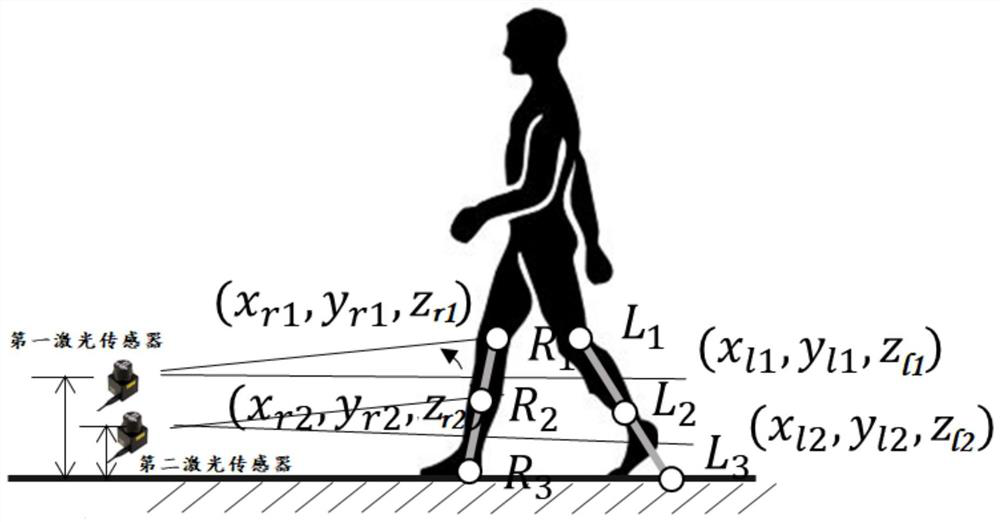
[0061] A method for evaluating the rehabilitation status of a leg patient provided by the present invention is applied to a walking-assisting robot. The walking-assisting robot is provided with a first laser sensor and a second laser sensor, and the first laser sensor is located on the second Above the laser sensor, the first laser sensor scans the upper part of the human body, and the second laser sensor scans the lower part of the human body. The walking aid robot also includes a microcomputer controller, a 24V rechargeable battery, and an omnidirectional mobile chassis. The data acquired by the first laser sensor and the second laser sensor are analyzed and processed, and based on the processing results, the omnidirectional mobile chassis is controlled to move.
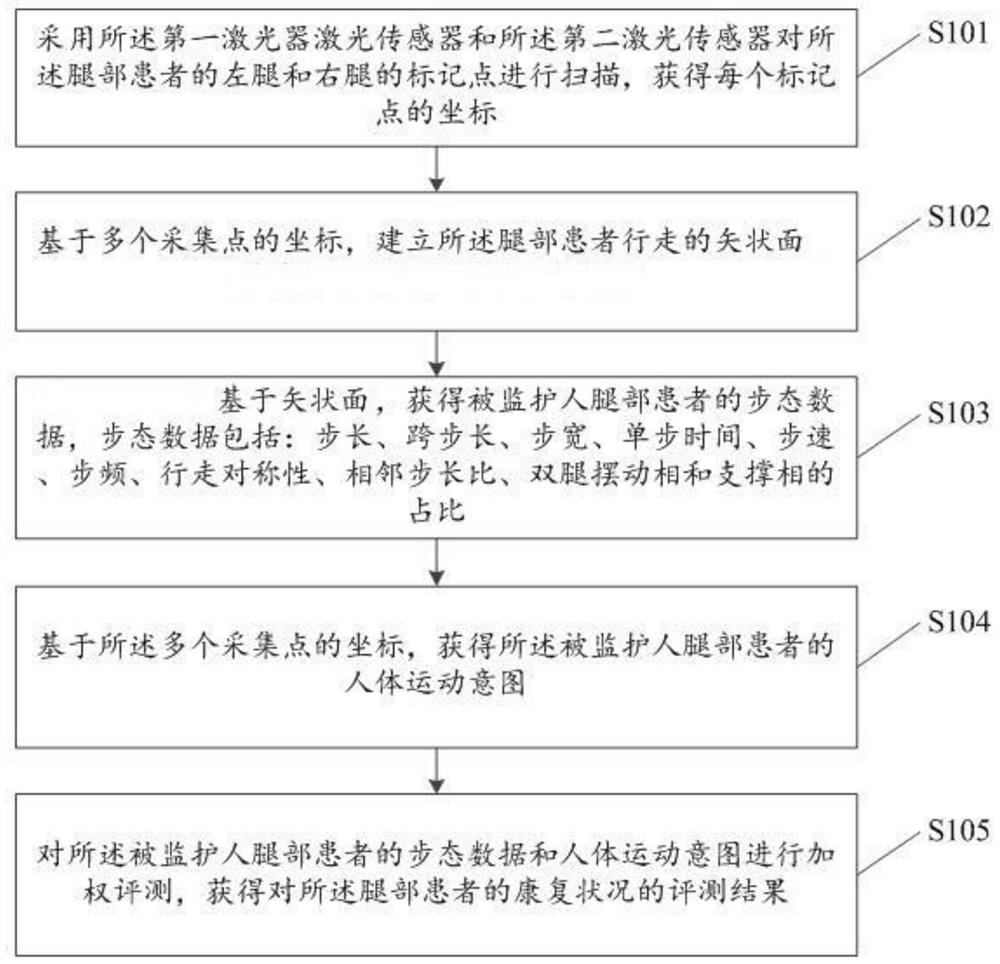
[0062] Such as figure 1 shown, including:
[0063] S101. Use the first laser sensor and the second laser sensor to scan the marking points of the left leg and the right leg of the leg patient, and obtain the coord...
Embodiment 2
[0156] Based on the same inventive concept, the present invention provides a device for evaluating the rehabilitation status of a leg patient, which is applied to a walking-assisting robot, and the walking-assisting robot is provided with a first laser sensor and a second laser sensor, so The first laser sensor is located above the second laser sensor, such as Figure 5 shown, including:
[0157] The scanning module 501 is configured to use the first laser sensor and the second laser sensor to scan the marking points of the left leg and the right leg of the leg patient, and obtain the coordinates of each marking point;
[0158] Establishing a sagittal plane module 502, configured to establish a sagittal plane for walking of the leg patient based on the coordinates of a plurality of marker points;
[0159] The gait data obtaining module 503 is used to obtain the gait data of the leg patient based on the sagittal plane and the direction vector, the gait data includes: step leng...
Embodiment 3
[0197] Based on the same inventive concept, the third embodiment of the present invention also provides a walker robot, such as Figure 6As shown, it includes a memory 604, a processor 602, and a computer program stored on the memory 604 and operable on the processor 602. When the processor 602 executes the program, the above-mentioned evaluation of the rehabilitation status of the leg patient is realized. The steps of any of the methods.
[0198] Among them, in Figure 6 In, bus architecture (represented by bus 600), bus 600 may include any number of interconnected buses and bridges, bus 600 will include one or more processors represented by processor 602 and various types of memory represented by memory 604 circuits linked together. The bus 600 may also link together various other circuits, such as peripherals, voltage regulators, and power management circuits, etc., which are well known in the art and thus will not be further described herein. The bus interface 606 provi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More