Active obstacle avoidance control method based on rectangular clustering collision cone model
A control method and cone model technology, applied in the direction of control devices, etc., can solve the problems of reducing the protection effect of the vehicle passive safety restraint system, rear-end collision between the rear vehicle and the self-vehicle, lack of comprehensive judgment and coordination processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
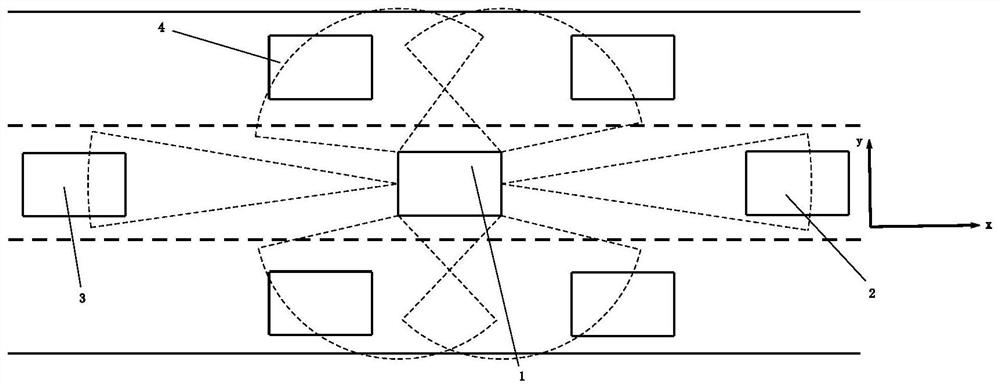
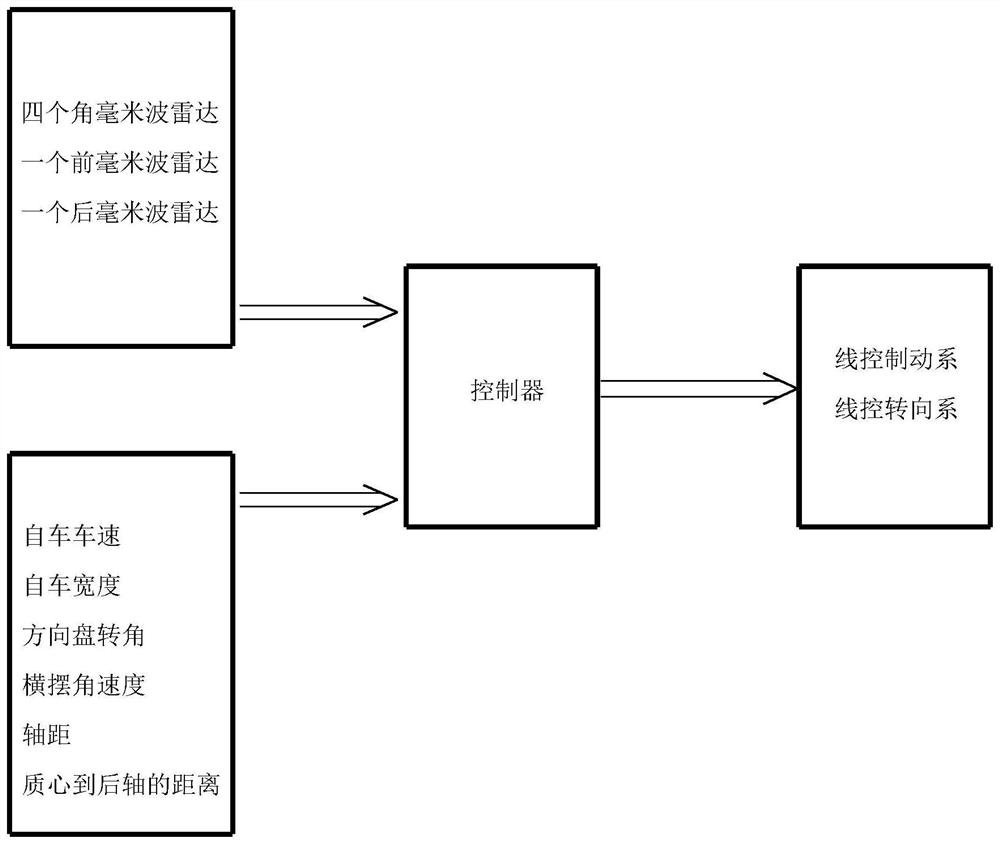
[0072] figure 2 Is a schematic top view of the vehicle in working condition, image 3 It is a schematic diagram of the implementation system flow diagram of the vehicle active obstacle avoidance control method, combined figure 2 with image 3 Be explained.
[0073] The vehicle active collision avoidance control system that implements the rectangular cluster collision cone model includes: an external environment perception system, a vehicle driving state monitoring system, a controller and an actuator.
[0074] The external environment perception system mainly uses millimeter-wave radar to obtain information about the surroundings of the vehicle 1, including the speed, acceleration and distance of the vehicle 2, behind the vehicle 3 and the vehicle 4. The vehicle driving state monitoring system collects driving information and physical parameters of the vehicle 2 and provides input data for the controller. The controller judges the sudden deceleration in front of the vehicle 1 bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More