

Integrated unmanned aerial vehicle control system based on software bus
A technology of software bus and control system, applied in the direction of control/adjustment system, vehicle position/route/height control, non-electric variable control, etc., to achieve the effect of improving reliability, improving usability and fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the examples, but the embodiments of the present invention are not limited thereto. If there are any parts that are not specifically described in detail below, those skilled in the art can realize or understand with reference to the prior art.
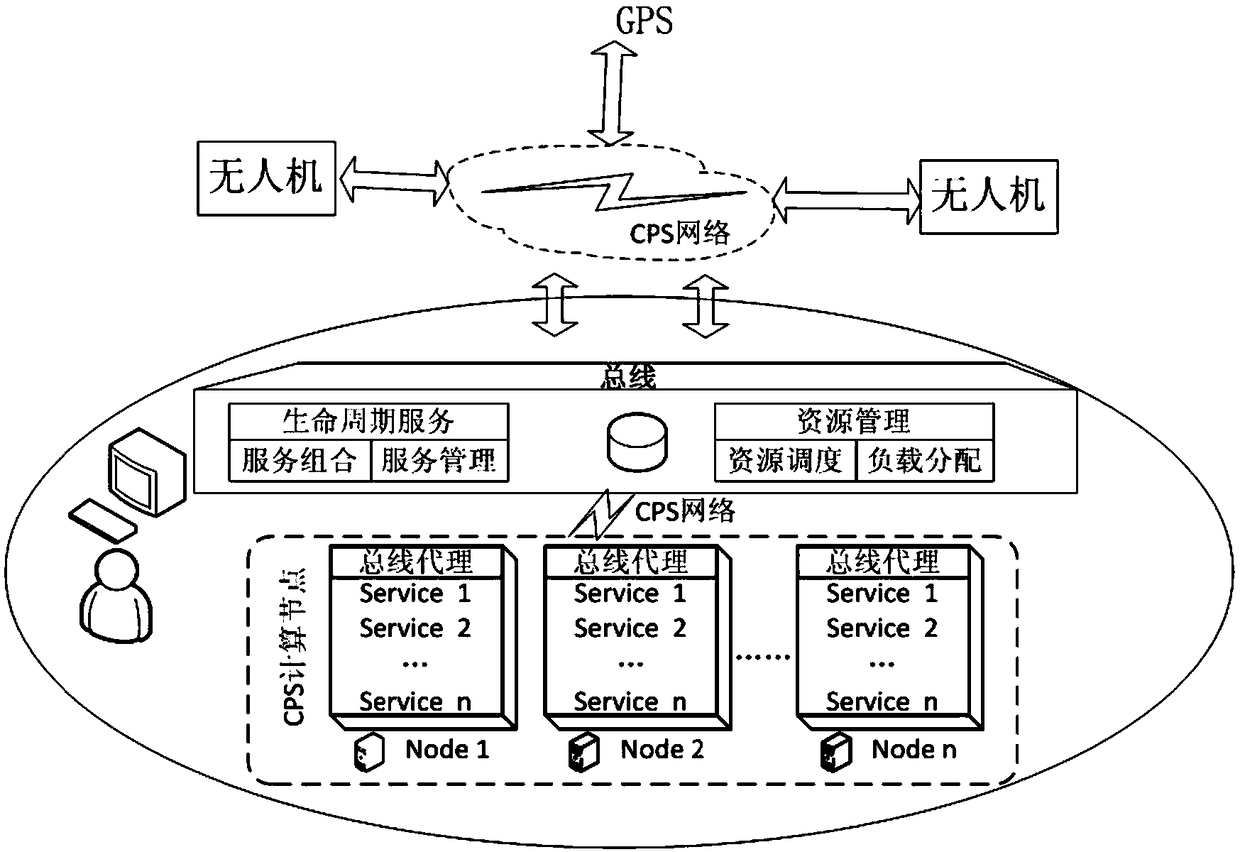
[0031] An integrated UAV control system architecture based on software bus in this example, such as figure 1 As shown, the centralized management mode based on the software bus is adopted to realize the integrated control of multi-machine tasks and global resource scheduling. Main content of the present invention comprises:
[0032] 1) Integrated system architecture based on software bus
[0033] Integrated system architecture based on software bus such as figure 1 As shown, it includes UAV, sensing equipment, ground control system (bus node, computing node, bus agent), network and other parts.
[0034] bus agent. The bus agent is distributed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More