

UPS-based parallel structure wheel-foot mobile robot
A mobile robot and robot technology, applied in the field of robotics, can solve the problem of insufficient stability of the robot, and achieve the effects of large carrying capacity, good movement flexibility, and reduced complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
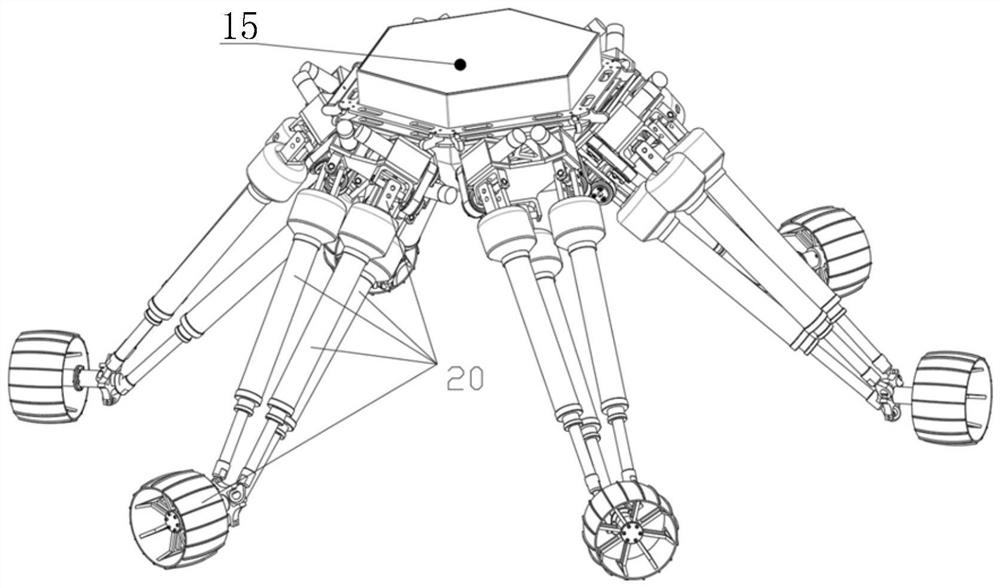
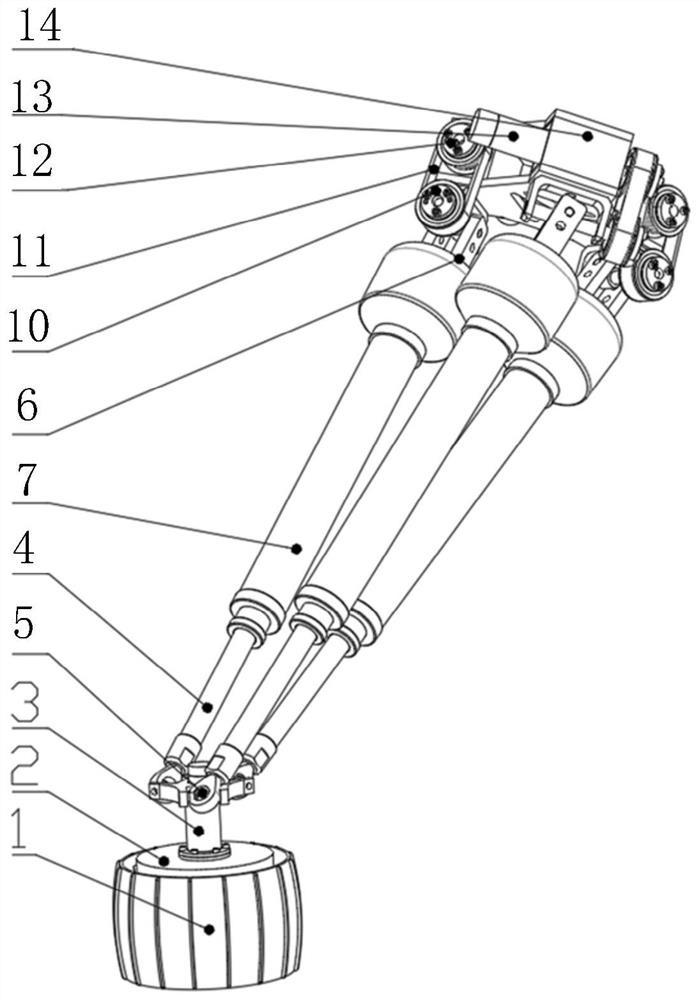
[0049] The invention provides a UPS-based parallel structure wheel-foot mobile robot, such as figure 1 , figure 2As shown, it includes a wheel 1, a support carrier 15 and a plurality of mechanical leg assemblies 20, and one end of the plurality of mechanical leg assemblies 20 is evenly arranged along the circumferential direction of the lower side of the support carrier 15, and the wheel 1 is installed on the mechanical leg The other end of the assembly 20, in a preferred example, the number of the me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More