

Linear correction positioning method and system of acoustic emission source with unknown wave velocity, and storage medium
A technology of acoustic emission source and positioning method, which is applied in the direction of radio wave measurement system, positioning, measuring device, etc., and can solve the problems of low calculation efficiency and inaccurate positioning of acoustic emission source
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
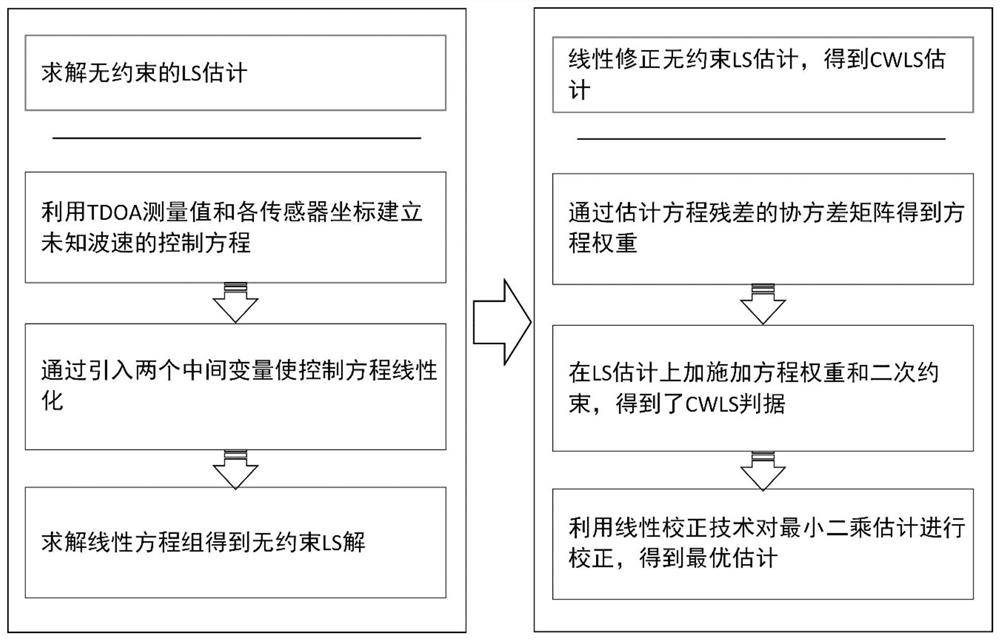
[0100] Such as figure 1 As shown, this embodiment provides a linear correction positioning method for an acoustic emission source with unknown wave velocity, including:
[0101] S01: Select a sensor from multiple sensors as a reference sensor; construct the TDOA equation of unknown wave velocity according to the reference sensor, and obtain a linear equation system by introducing two intermediate variables V and K; solve the linear equation system to obtain an unconstrained least squares Multiply (LS) solution; where V=v 2 , v represents the propagation velocity of the acoustic emission signal, and x, y, and z are the components of the coordinates of the acoustic emission source respectively; where the sensor is an acoustic emission or microseismic sensor;
[0102] S02: Obtain the weight matrix of the linear equation system by estimating the residual error of the equation;
[0103] S03: Apply the weight matrix and quadratic constraints to the least squares (LS) estimation ...
Embodiment 2
[0107] In this embodiment, on the basis of Embodiment 1, in the step S01, the coordinates of the reference sensor are set to (0, 0, 0), then the expressions of the linear equations are as follows:
[0108]
[0109] Among them, x, y, z are the components of the coordinates of the acoustic emission source, and x i 、y i ,z i represent the coordinate components of the i-th sensor respectively, t i,0 represents the TDOA measurement value between the i-th sensor and the reference sensor, and M represents the number of sensors; in this embodiment, M≥6, and M sensors are not all coplanar.
[0110] The least squares (LS) solution is:
[0111]
[0112] in The symbol T in the upper right corner means matrix transpose.
Embodiment 3
[0114] In this embodiment, on the basis of Embodiment 2, in the step S02, the weight matrix is:
[0115] W=(4BNB) -1
[0116] in, means t i,0 Items that do not contain noise; in the weight matrix W, unknown parameters be t i,0 replaced by ; in addition, the unknown parameters K and V are respectively replaced by θ 0 (4) and θ 0 (5) Approximate substitution, where θ 0 (4) and θ 0 (5) represent the least squares solution θ respectively 0 The fourth and fifth elements of .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More