

Indoor missile disassembling robot and working method thereof
A technology of robots and steering gears, applied in the field of robots, can solve the problems of easy mistakes and time-consuming manual processing, and achieve the effect of ensuring accuracy, high efficiency, safe and efficient bomb disposal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The specific implementation manners of the present invention will be described below in conjunction with the accompanying drawings.
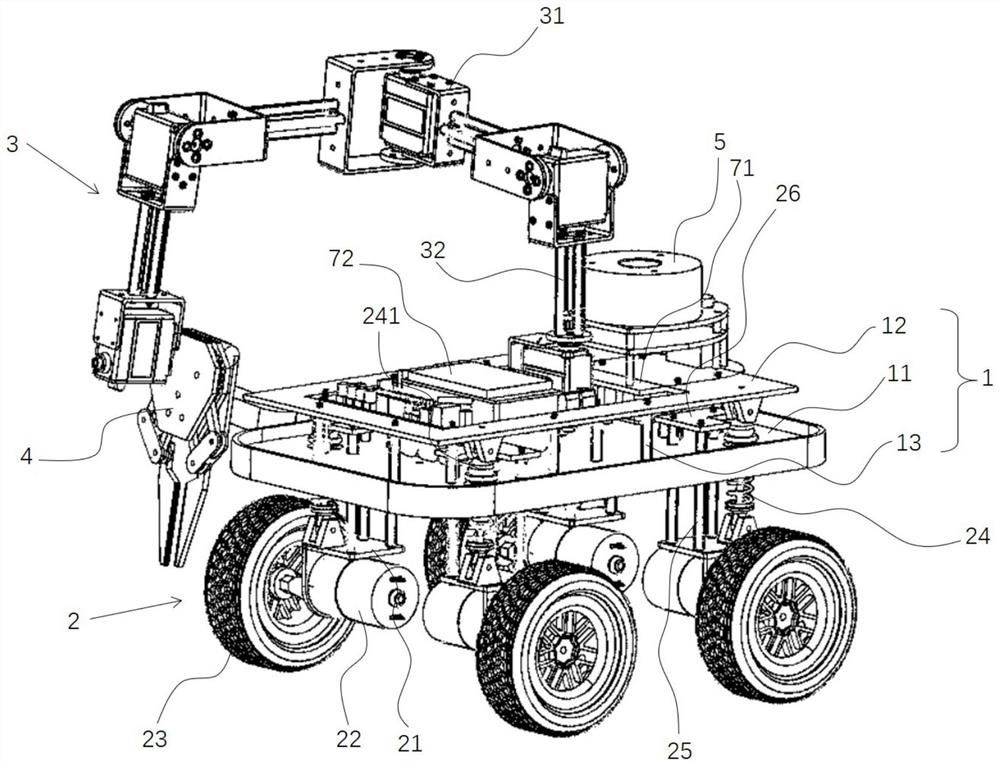
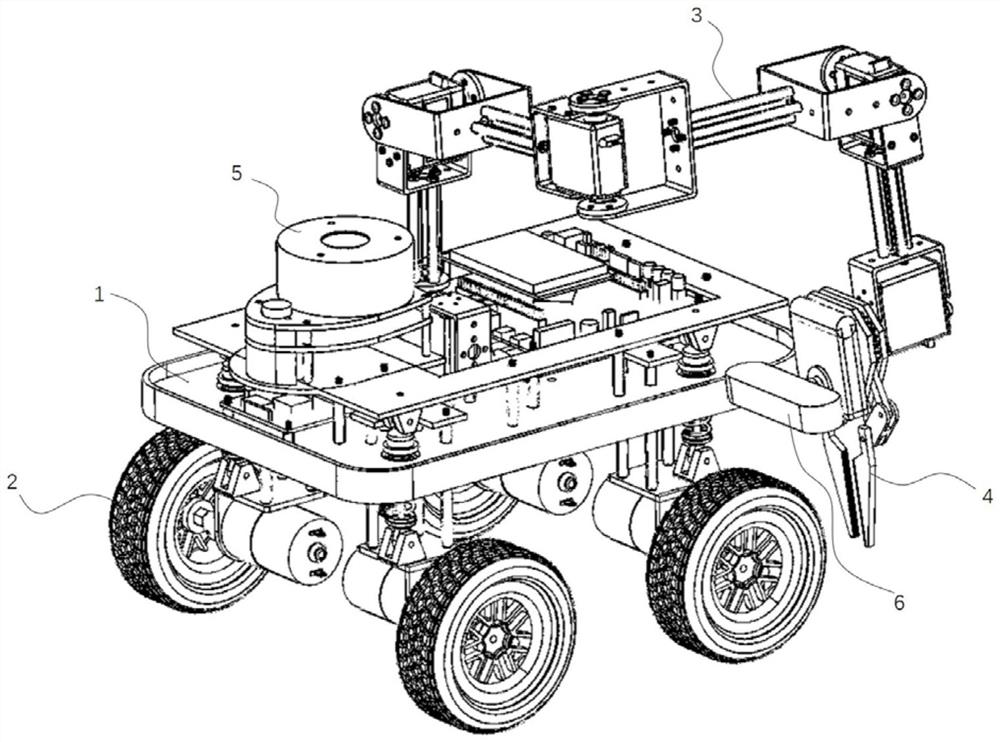
[0019] Such as figure 1 and 2 As shown, the present invention provides an indoor bomb disposal robot, including a bracket assembly 1, four sets of drive assemblies 2, a mechanical arm 3, mechanical scissors 4, a laser radar 5, a camera 6 and a control unit.
[0020] The bracket assembly 1 includes a bracket body 11 and a protective plate 12 .
[0021] The frame body 11 has a bottom plate. Specifically, the frame body 11 is in the shape of a plate, and there are side walls around the bottom plate to further protect the components inside it.
[0022] The protective plate 12 is in the shape of a frame, and the protective plate 12 is fixed on the top of the frame body 11 by several vertically arranged protective support rods 13 .
[0023] The four groups of drive assemblies 2 are distributed at the top corners of a rectangle.
[0024] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More