

A space-time joint optimization method for trajectory planning of quadrotor unmanned aerial vehicle
An unmanned aerial vehicle and joint optimization technology, applied in the directions of unmanned aerial vehicles, aircraft, rotorcraft, etc., can solve the lack of real-time and fast space-time joint optimization trajectory generation method, ignore trajectory time segment optimization, trajectory generation Speed slowdown and other problems, to achieve the effect of space-time joint optimization, easy search, and convenient decoupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
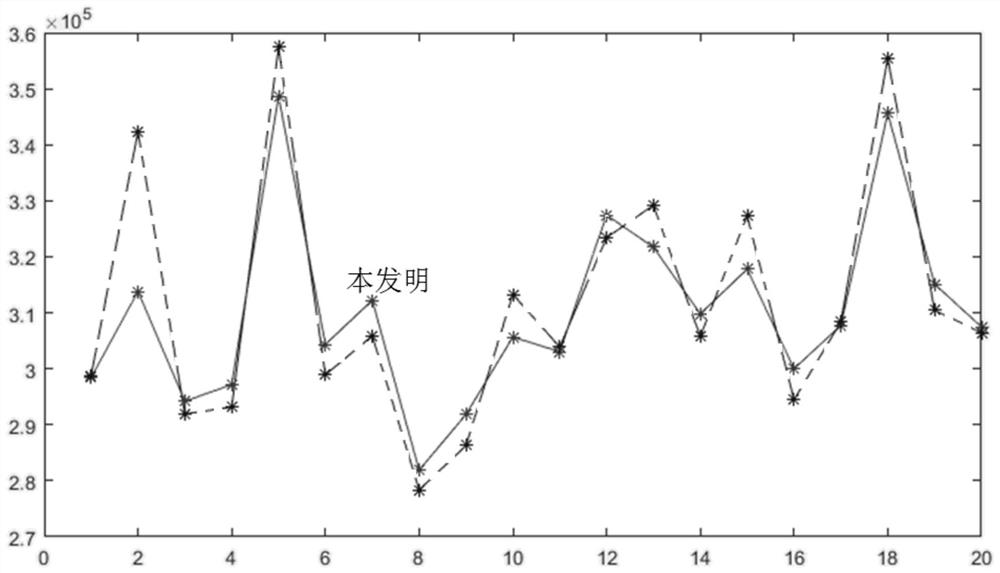
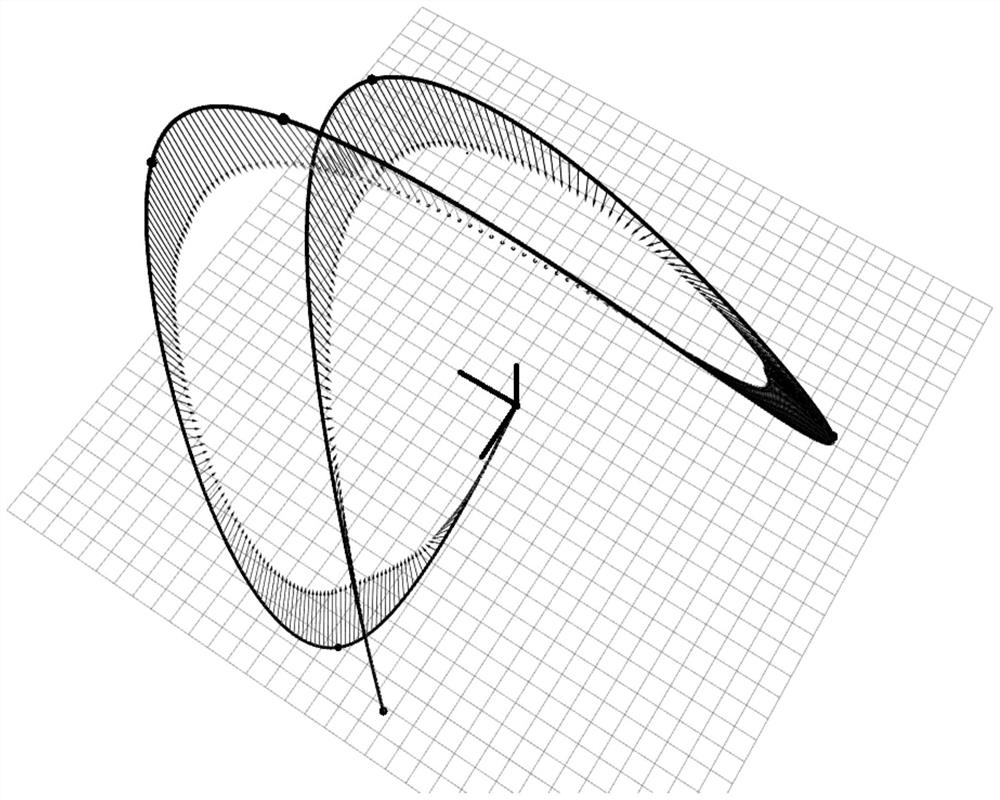
[0104] Sampling 6 three-dimensional coordinates as the path point, set the initial speed, initial acceleration, initial Jerk, terminal speed, terminal acceleration, terminal JERK, and constraint conditions:
[0105] v_max = 7m / s, A_max = 4m / s 2
[0106] Consideration function parameter m = 6, j = 3, w t = 1024, w d = 50.
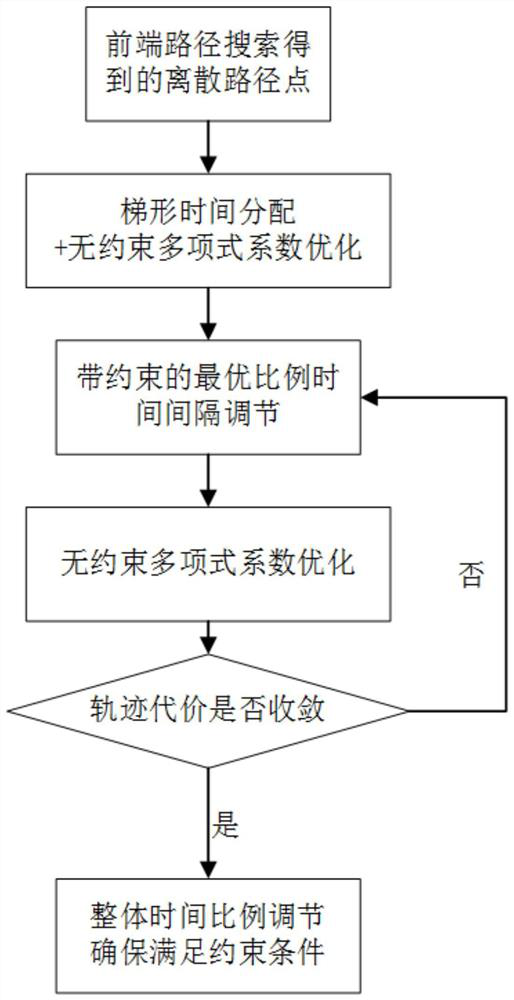
[0107] When the time interval is allocated by the trapezoidal time distribution, the unconstrained polynomial coefficient optimization link derivation step is still described in terms of one-dimensional situation:
[0108] Cost_D of a five-order polynomial trajectory of a single single axis:
[0109]
[0110] The optimization problem of the entire trajectory is transformed into:
[0111]
[0112]
[0113] The equation conditions include the initial time to constrain the zero state constraint, path point constraints, and two types of trajectory connections at the initial time, and the acceleration continuous constraints. The coefficient matrix A converts...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More