

A map generation method, device and system based on imu and lidar
A lidar and map generation technology, applied in the direction of measuring devices, radio wave measurement systems, satellite radio beacon positioning systems, etc., can solve the problems of slow matching algorithm between frames, complex point cloud map drawing process, etc., to speed up calculation Speed, meet the needs of high-precision map construction, fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
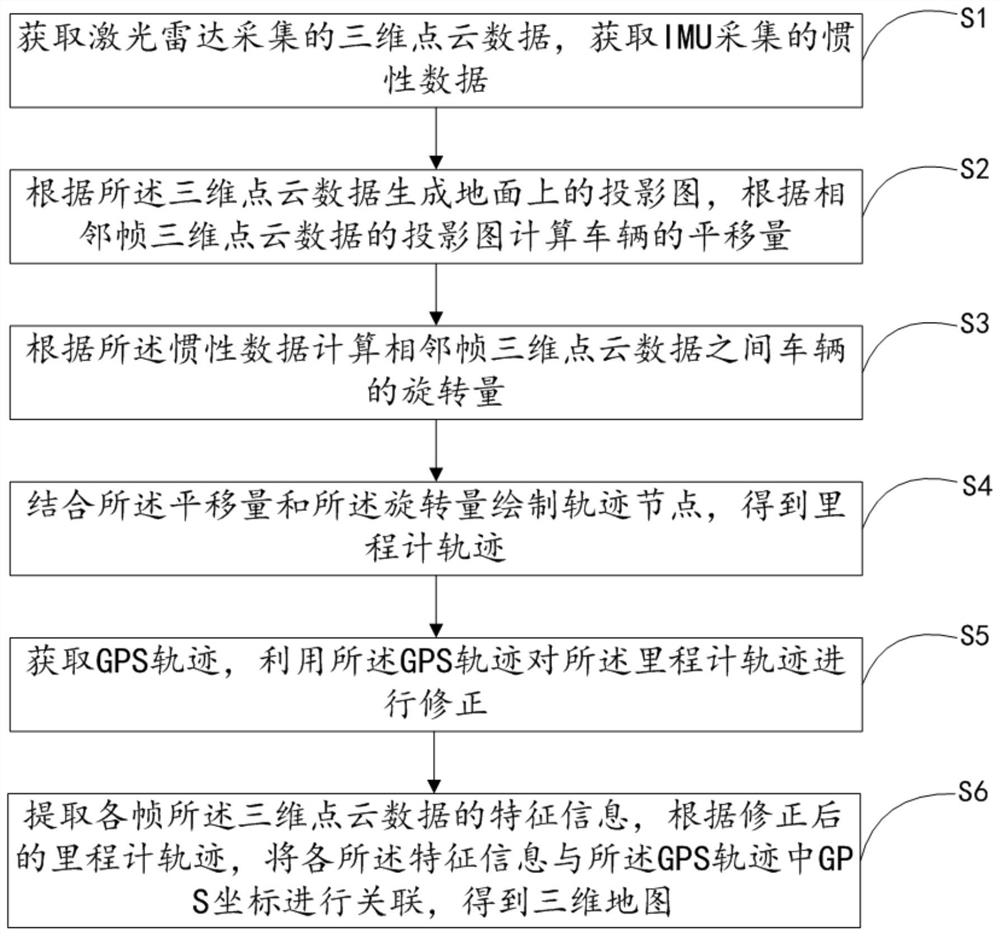
[0027] like figure 1 As shown, Embodiment 1 of the present invention provides a map generation method based on IMU and lidar, including the following steps:
[0028] S1. Obtain 3D point cloud data collected by lidar, and obtain inertial data collected by IMU;
[0029] S2, generating a projection map on the ground according to the three-dimensional point cloud data, and calculating the translation amount of the vehicle according to the projection map of the three-dimensional point cloud data of adjacent frames;
[0030] S3, calculating the rotation amount of the vehicle between the three-dimensional point cloud data of adjacent frames according to the inertial data;
[0031] S4, drawing a trajectory node in combination with the translation amount and the rotation amount to obtain an odometer trajectory;
[0032] S5, acquiring a GPS track, and using the GPS track to correct the odometer track;
[0033] S6. Extract feature information of the three-dimensional point cloud data ...
Embodiment 2
[0146] Embodiment 2 of the present invention provides a map generation device based on IMU and lidar, including a processor and a memory, where a computer program is stored in the memory, and when the computer program is executed by the processor, the implementation provided in Embodiment 1 is realized A method for map generation based on IMU and lidar.
[0147] The map generation device based on IMU and lidar provided by the embodiment of the present invention is used to realize the map generation method based on IMU and lidar. Therefore, the technical effect of the map generation method based on IMU and lidar is based on IMU and laser The radar map generation device is also equipped, and will not be repeated here.
Embodiment 3
[0149] like Figure 4 As shown, Embodiment 3 of the present invention provides a map generation system based on IMU and lidar, including the map generation device based on IMU3 and lidar provided in Embodiment 2, and also includes vehicle body 1, lidar 2, IMU3 and GPS receiver 4;
[0150] The map generation device based on IMU and lidar, lidar 2, IMU3 and GPS receiver 4 are all installed on the vehicle body 1, and the lidar 2, IMU3 and GPS receiver 4 are respectively connected with the IMU-based receiver 4. It is electrically connected to the map generating device of the lidar;
[0151] The lidar 2 is used to collect 3D point cloud data, and send the 3D point cloud data to the map generation device based on IMU and lidar;
[0152] The IMU3 is used to collect inertial data of the vehicle, and send the inertial data to the map generation device based on the IMU and lidar;
[0153] The GPS receiver 4 is connected to a remote differential GPS reference station 6, and is used to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More