Aluminum material image defect detection method based on self-adaptive anchor frame
A defect detection and self-adaptive technology, applied in the field of computer vision and defect detection, can solve the problems of inflexible detection methods and poor detection methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] Below in conjunction with accompanying drawing, the present invention is further described:
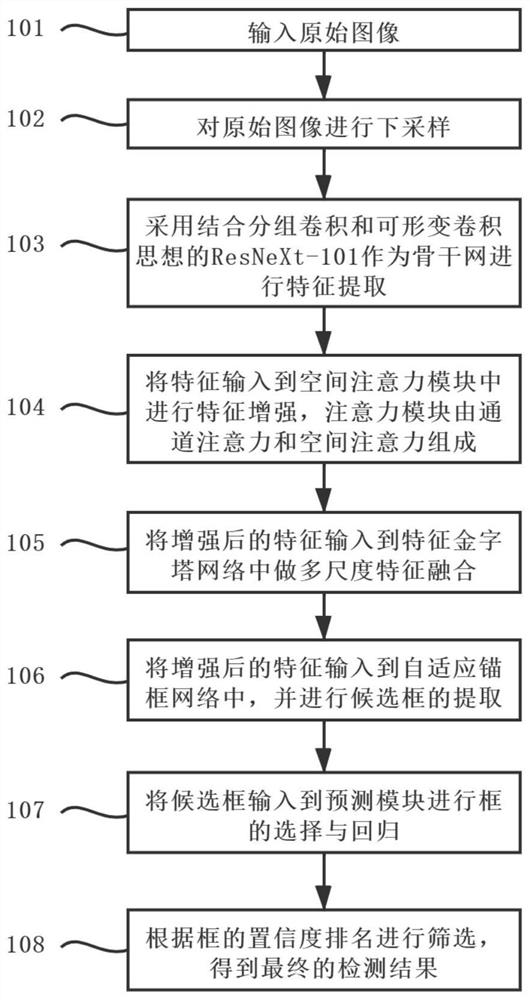
[0083] see figure 1 , the present invention comprises the following steps:
[0084] Step 101, using a camera to acquire image data or directly uploading image data as image input.
[0085] Step 102, perform s times downsampling operation on the original image (W×S) to obtain an image of size (W / s)×(H / s).
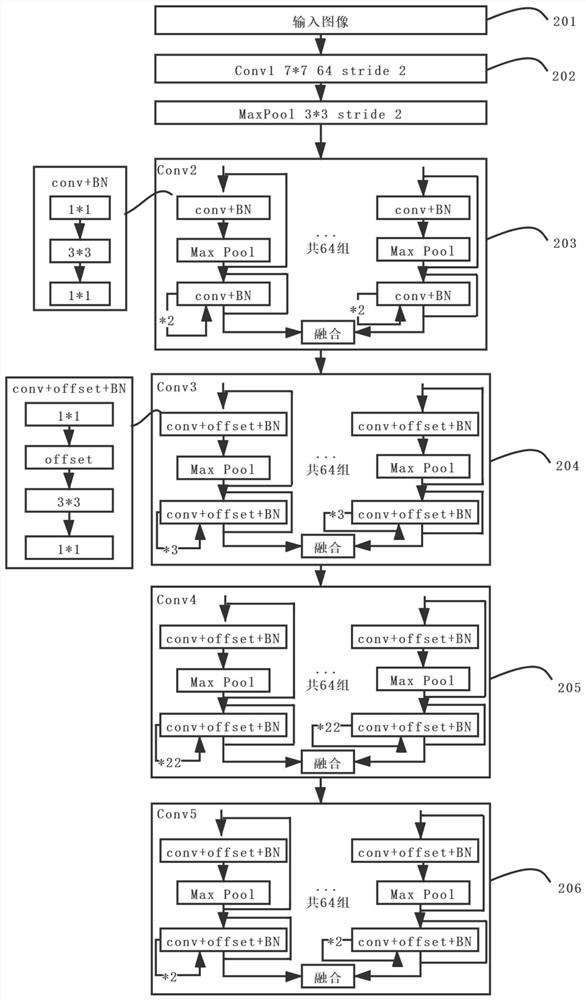
[0086] Step 103, using ResNeXt-101 combined with group convolution and deformable convolution as the backbone network for feature extraction, and processing the original input image through a convolution layer with a convolution kernel of 7×7 and a batch normalization layer Finally, it is divided into 64 groups and entered into Conv2-Conv5. The group convolution can prevent over-fitting of a specific data set without changing the parameter amount, so as to achieve a more accurate effect.
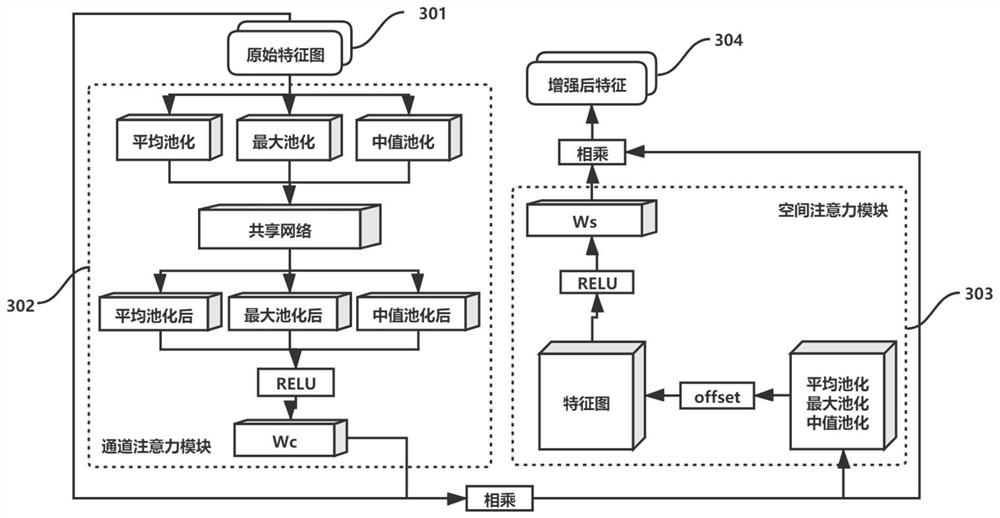
[0087] Step 104, input the features extracted in step 103 into the attention module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com