

Binocular semantic SLAM method for automatic driving scene
An automatic driving and dual-purpose technology, which is applied in neural learning methods, instruments, biological neural network models, etc., can solve problems such as object mismatch, parameter expression is not accurate enough, mask is not fine enough, etc., to improve accuracy and robustness , improve accuracy and robustness, and intuitive physical meaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
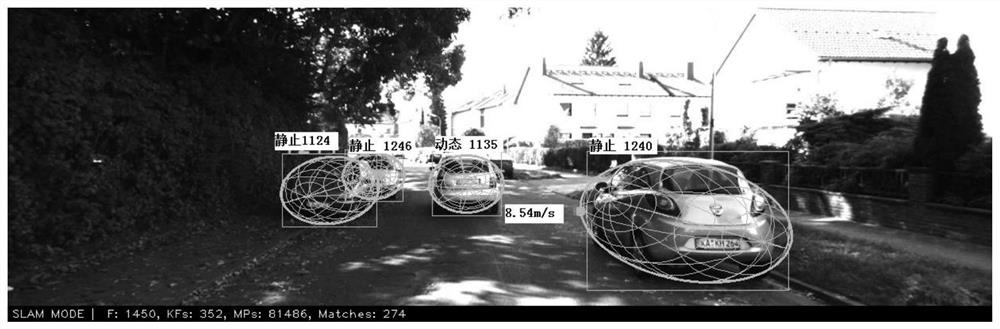
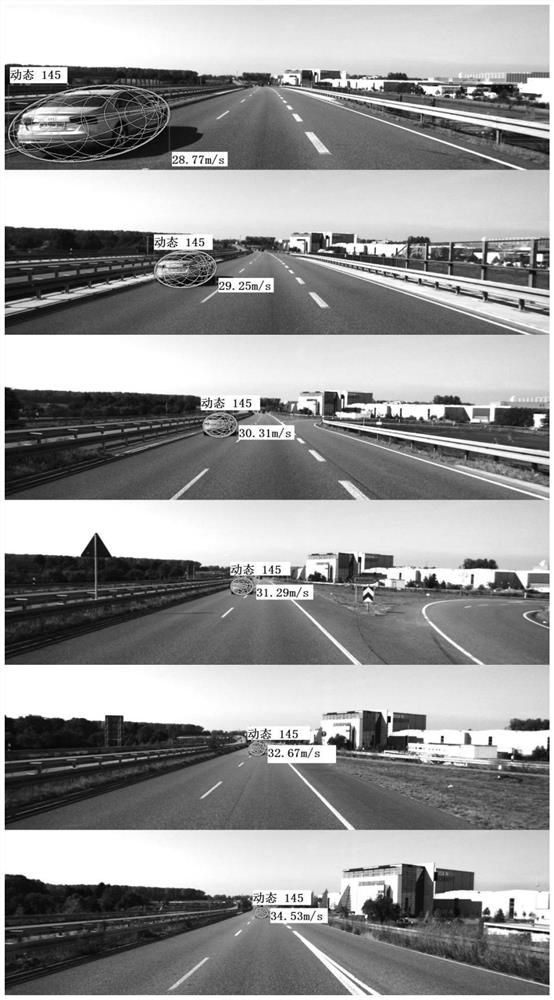
[0108]In order to further demonstrate the implementation effect of the present invention, the present invention selects 8 scenes with more dynamic vehicles from the raw data of KITTI for testing. The test uses the color binocular images provided by the data set, because KITTI does not provide the original Ground Truth of the data, this embodiment uses the same method as in KITTI to project the pose generated by the high-precision inertial navigation data to the corrected left-eye color camera coordinate system as the ground truth. In order to make the object matching more stable, the number of feature points extracted by ORB-SLAM2 and the present invention are both set to 5000 in the test. Since the loopback detection will reduce the accumulated error, in order to more accurately evaluate the influence of the method of the present invention on the error, the loopback detection is turned off for testing during the evaluation. As a result, the evaluation tool of Grupp et al. was used ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More