

Multi-sensor fused search and rescue robot system
A multi-sensor fusion and robot system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as imperfect and stable operation capabilities and communication capabilities that cannot meet the requirements, and achieve the effect of ingenious structural design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to deepen the understanding and recognition of the present invention, the present invention will be further described and introduced below in conjunction with the accompanying drawings.
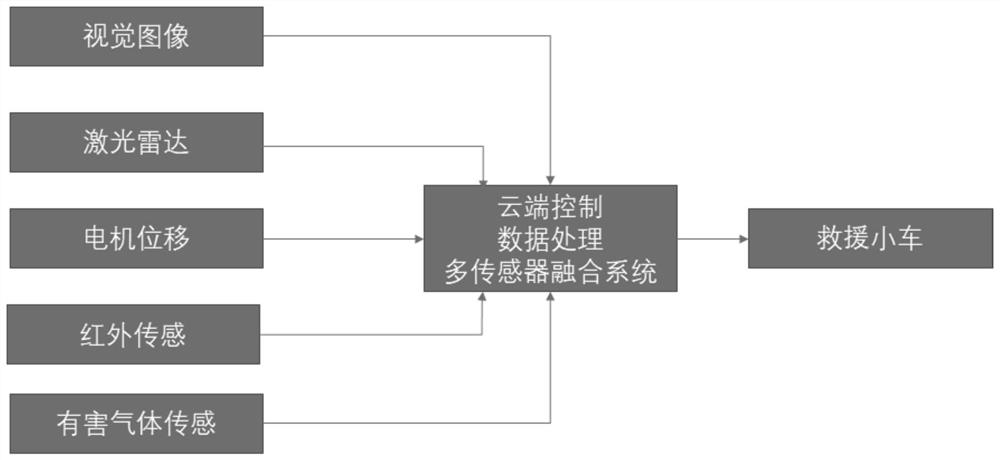
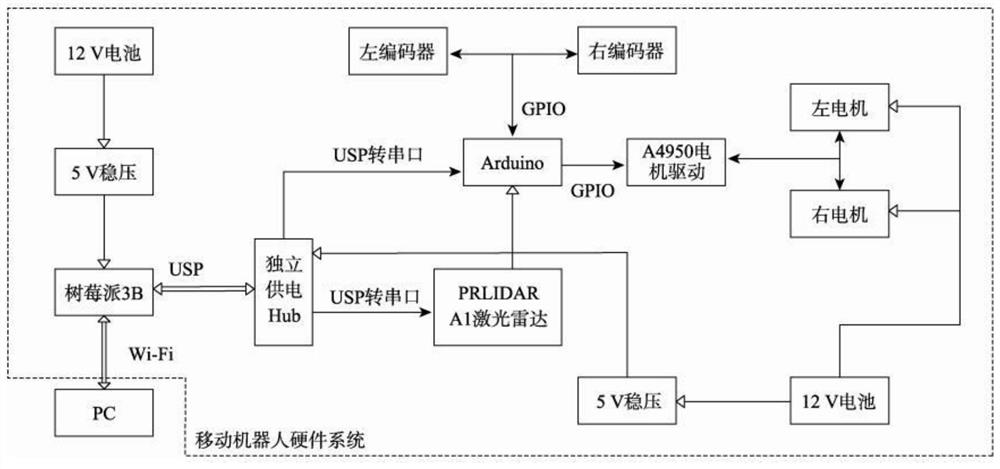
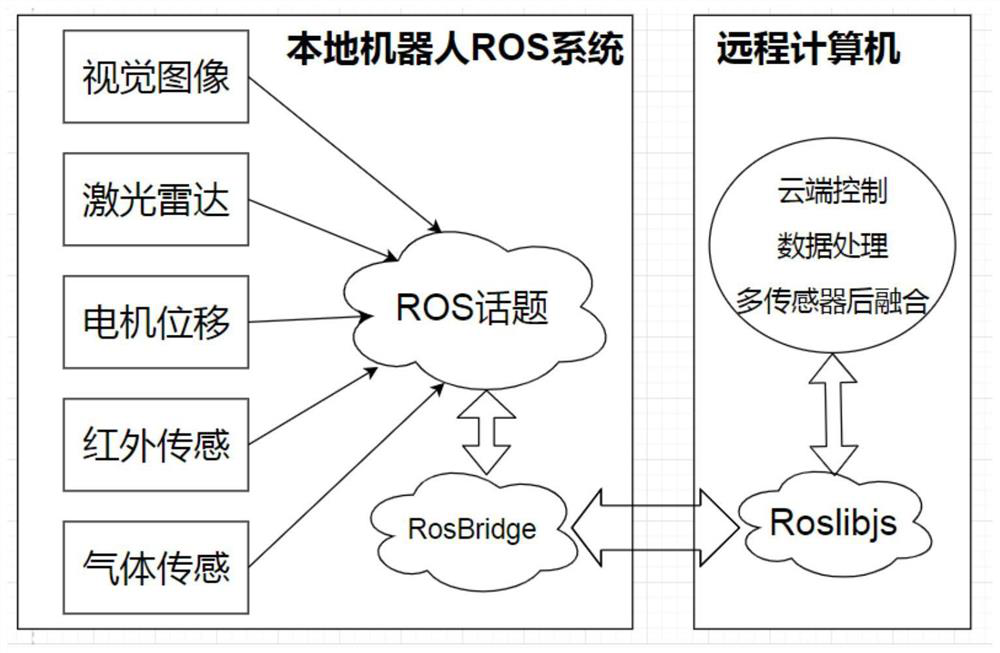
[0029] Such as Figure 1-4 A preferred embodiment of the multi-sensor fusion search and rescue robot system of the present invention is given. In this embodiment, the lower structure group of the robot system includes: Waffle_pi casing group, with 4 servo motor groups, two groups of 12V / 1800mAh The battery pack is equipped with a laser radar rangefinder, an infrared sensor, a harmful gas sensor, and a binocular camera. In the upper structure, in terms of hardware control, the OpenCR controller is used to complete the overall drive and control of the underlying distributed hardware such as servo motors, power supplies, laser range finders, infrared sensors, harmful gas sensors, and binocular cameras. The overall control of the hardware is controlled by the SBC microcomputer, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More