

Rehabilitation movement control method and system based on rehabilitation robot, equipment and medium
A technology of motion control system and rehabilitation robot, which is applied in the direction of sensors, passive exercise equipment, medical science, etc., can solve the problems of wide influence, lack of flexibility in system control, and can only receive position commands, etc., to achieve the effect of comfortable training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
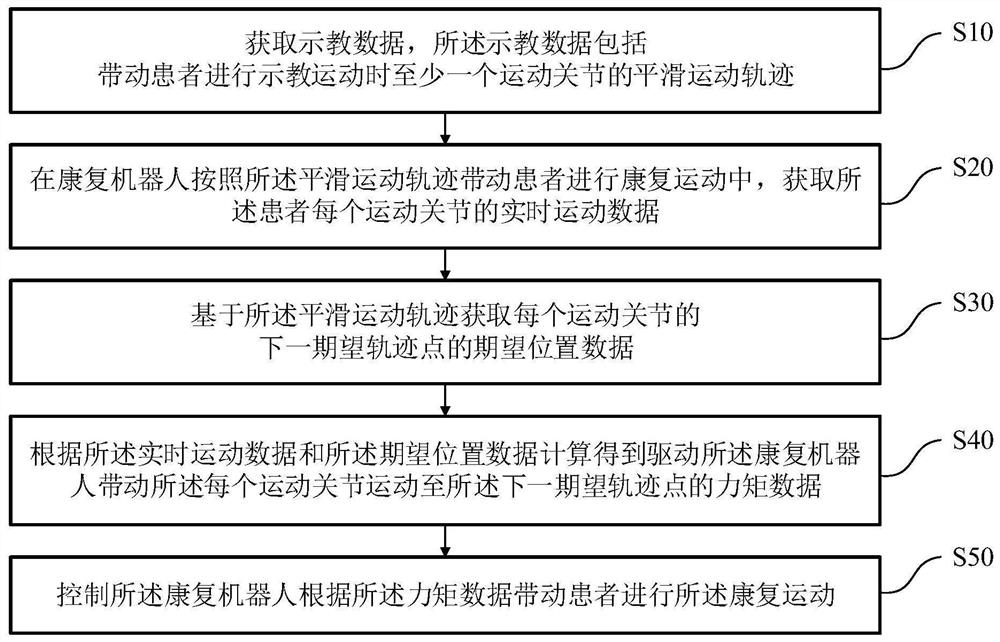
[0075] A rehabilitation motion control method based on a rehabilitation robot, such as figure 1 As shown, the rehabilitation exercise control method includes:
[0076] S10. Acquire teaching data, where the teaching data includes a smooth motion track of at least one motion joint when the patient is driven to perform the teaching motion;
[0077] S20. Acquiring real-time motion data of each motion joint of the patient when the rehabilitation robot drives the patient to perform rehabilitation motion according to the smooth motion trajectory; the real-time motion data includes position data and joint speed data of each motion joint;
[0078] S30. Obtain expected position data of the next expected trajectory point of each kinematic joint based on the smooth motion trajectory;
[0079] S40. According to the real-time motion data and the expected position data, calculate and obtain the torque data for driving the rehabilitation robot to move each kinematic joint to the next expecte...
Embodiment 2
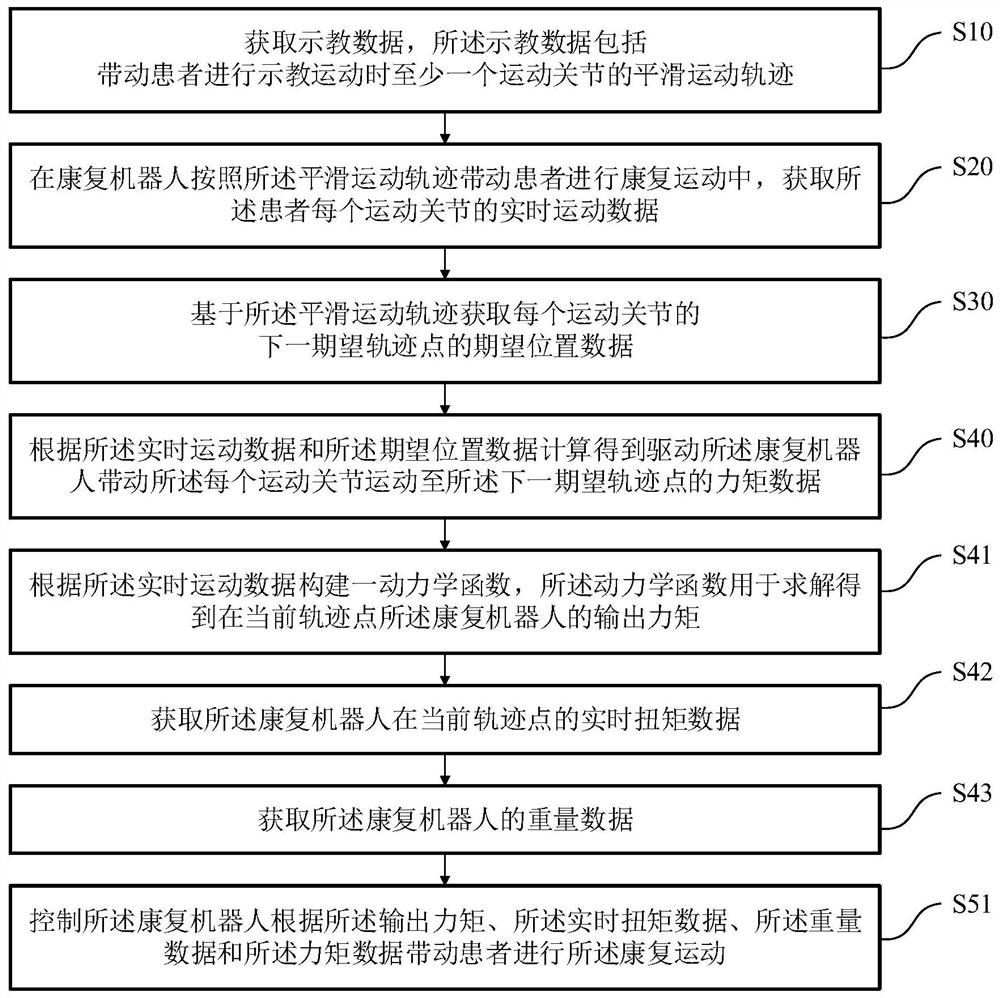
[0086] This embodiment is further on the basis of embodiment 1, as image 3 As shown, before step S50, the rehabilitation exercise control method also includes:
[0087] S41. Construct a dynamic function according to the real-time motion data, and the dynamic function is used to solve the output torque of the rehabilitation robot at the current trajectory point;
[0088] S42. Obtain real-time torque data of the rehabilitation robot at the current trajectory point; it should be noted that this data can be directly obtained through the motor encoder of the rehabilitation robot.
[0089] S43. Obtain weight data of the rehabilitation robot; the weight data is the gravity compensation amount of the mechanical arm of the rehabilitation robot, that is, the weight of the mechanical arm.
[0090] Step S50 specifically includes:
[0091] S51. Control the rehabilitation robot to drive the patient to perform the rehabilitation exercise according to the output torque, the real-time torqu...
Embodiment 3
[0131] This embodiment is further improved on the basis of Embodiment 1, the teaching data includes the teaching motion data of the kinematic joint at multiple teaching trajectory points, such as Figure 5 As shown, step S10 specifically includes:
[0132] S111. Select the target track point with the largest vertical distance from the line connecting the start teaching track point and the end teaching track point in the teaching movement;
[0133] S112. Determine whether the vertical distance between the target track point and the line connecting the start teaching track point and the end teaching track point in the teaching movement is greater than a preset threshold, if so, execute step S113, and then execute step S112. S114, if not, execute step S115;
[0134] S113. Extracting the target track point as a feature point;
[0135] S114. Taking the target trajectory point as a boundary point to divide the teaching movement into segmented teaching movement, return to step S111...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More