

Walking balance detection system and method for biped robot
A biped robot, balance detection technology, applied in radio wave measurement systems, machine/structural component testing, static/dynamic balance testing, etc. , to achieve the effect of simplifying the balance detection process and simplifying the adjustment process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034]The robot balance detection uses the balance instrument to judge the center of gravity, and at the same time, the algorithm is assisted to predict the change of the center of gravity. The technology is difficult and it is difficult to promote it on industrial robots. Unbalanced or not, the operation is simple and easy to apply.
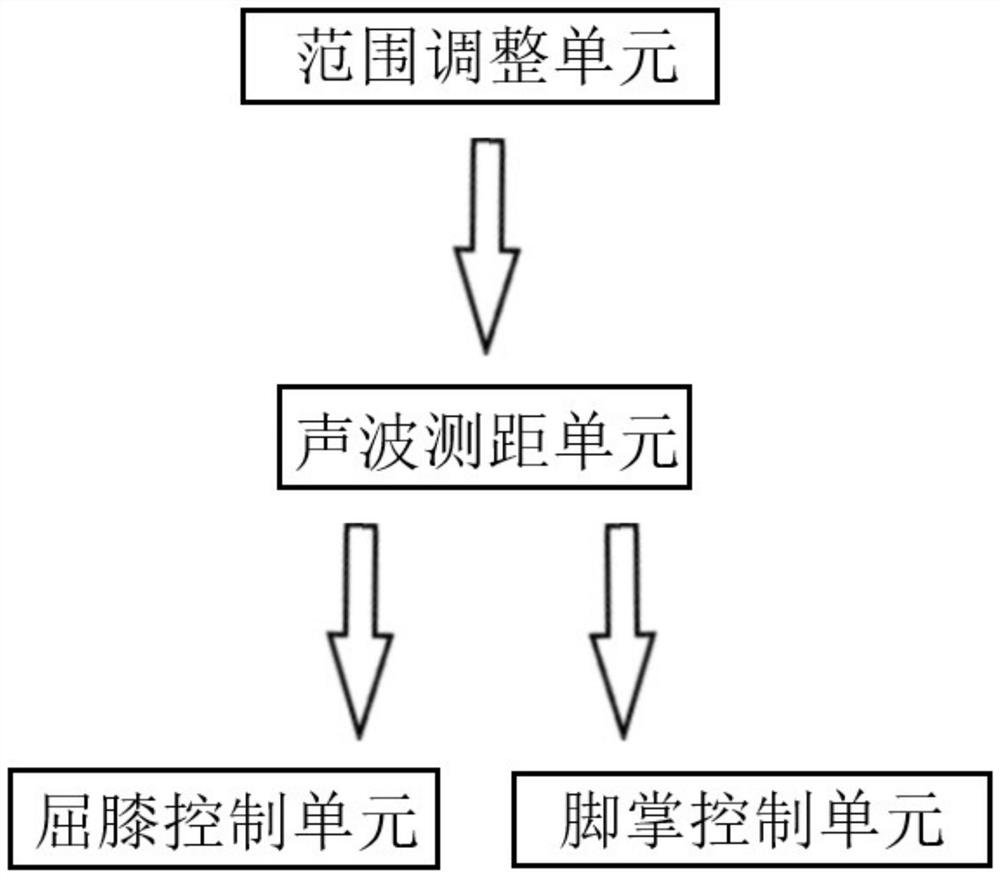
[0035] In this example, if figure 1 As shown, a biped robot walking balance detection system includes an acoustic wave ranging unit, a knee-bending control unit, a sole control unit and a range adjustment unit;
[0036] The sound wave ranging unit includes a sound wave transmitter and a sound wave receiver. The sound wave transmitter is arranged on the crotch of the robot to emit sound waves to the ground, and the sound wave receiver receives reflected sound waves;
[0037] Knee control unit, controlling the rotation angle of the robot knee joint gear;
[0038] The foot control unit controls the rotation angle of the robot's ankle joint gear; ...
Embodiment 2
[0054] When the robot walks out of balance, the existing body adjustment methods for the robot are difficult to popularize, and the requirements for the robot's own structure are too high, which is not suitable for industrial robots. In order to solve this problem, the biped robot is divided into three ranges of variation according to the height of the crotch, and the necessary adjustments are made to the leg joints of the robot according to the range of variation to simply adjust the unbalanced state.
[0055] In this example, if figure 1 As shown, a biped robot walking balance detection system includes an acoustic wave ranging unit, a knee-bending control unit, a sole control unit and a range adjustment unit;
[0056] The sound wave ranging unit includes a sound wave transmitter and a sound wave receiver. The sound wave transmitter is arranged on the crotch of the robot to emit sound waves to the ground, and the sound wave receiver receives reflected sound waves;
[0057] K...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More