

Double-array correlation standing wave field ultrasonic suspension and control system and method based on FPGA
A manipulation system and ultrasonic technology, which are applied to the suspension of non-contact micron-level objects and the field of three-dimensional space manipulation, can solve the problems of large delay error of PWM wave signal and affect the dynamic response characteristics of precise control, so as to achieve sharp dynamic manipulation and realize 3D dynamics, changes in single-body attitude, and the effect of reducing delay errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
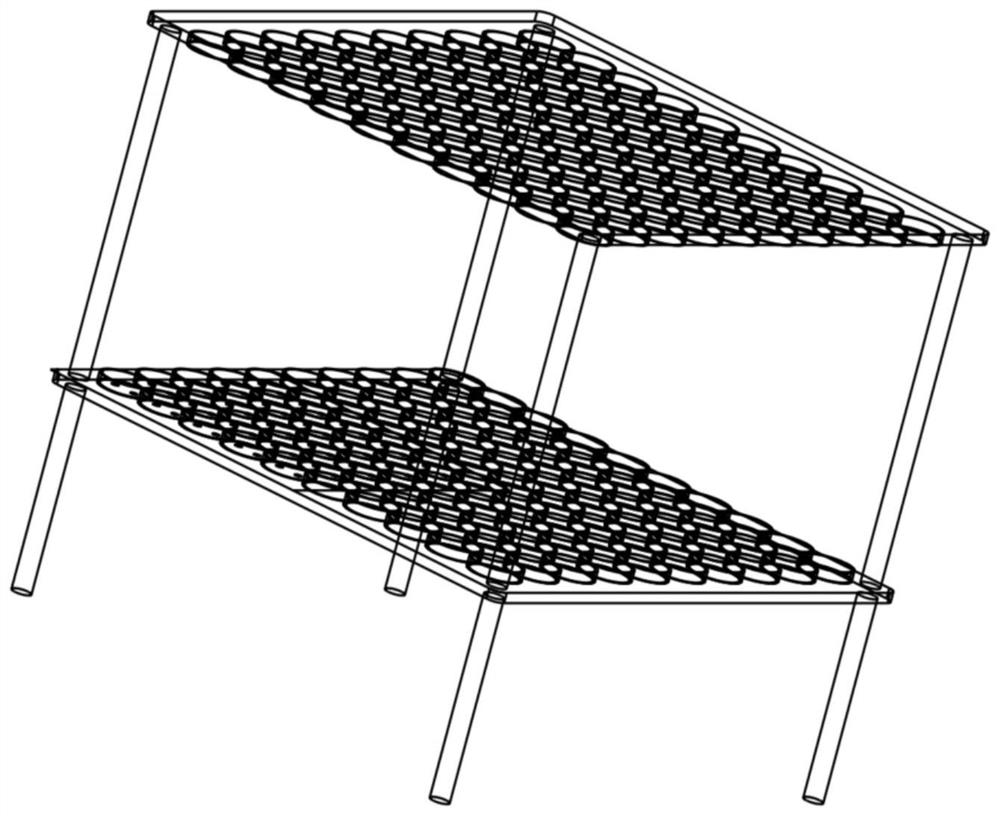
[0028] The FPGA-based dual-array standing wave field ultrasonic levitation and manipulation system of this embodiment includes an upper support plate, a lower support plate, several ultrasonic transducers distributed on the upper support plate and the lower support plate, and A driving module for driving the ultrasonic transducer;
[0029] Such as figure 1 As shown, 100 ultrasonic transducers are arranged on the upper and lower support plates, which are arranged on the two support plates made by 3D printing. The upper and lower support plates are separated by four copper pillars with a length of 127.5mm. And support it, that is, the copper column 1 in the figure; the bottom of the lower support plate uses four copper columns with a length of 50mm as the bottom support, that is, the copper column 2 in the figure; the upper and lower support plates are 150mm*150mm* The base of the ultrasonic transducer of 2 mm is the support plate 3 in the figure.
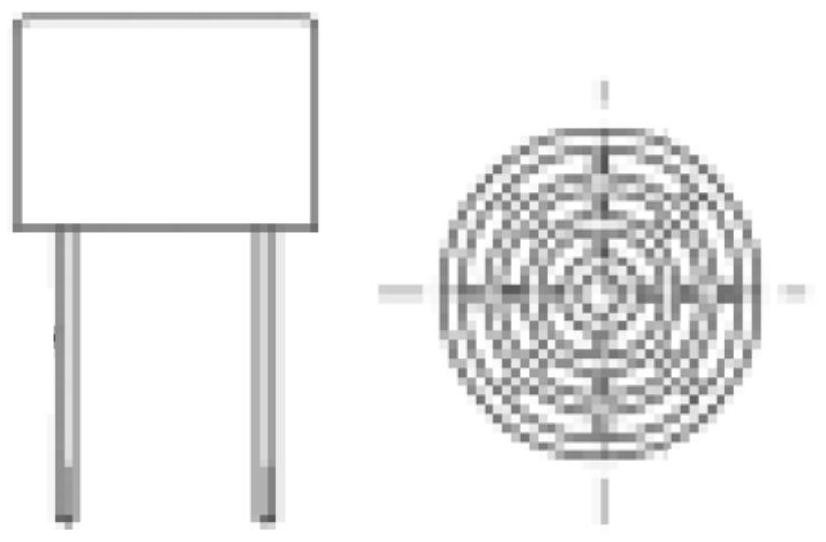
[0030] figure 2 It is the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More