Quadrotor unmanned aerial vehicle autonomous landing control system and method based on airship platform
A quadrotor UAV and control system technology, which is applied in the field of quadrotor UAV autonomous landing control system, can solve the problems of lack of small-scale tests, few applications of UAVs, and low precision, and achieve simple, efficient, and anti-corrosion devices. The effect of strong interference ability and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings.
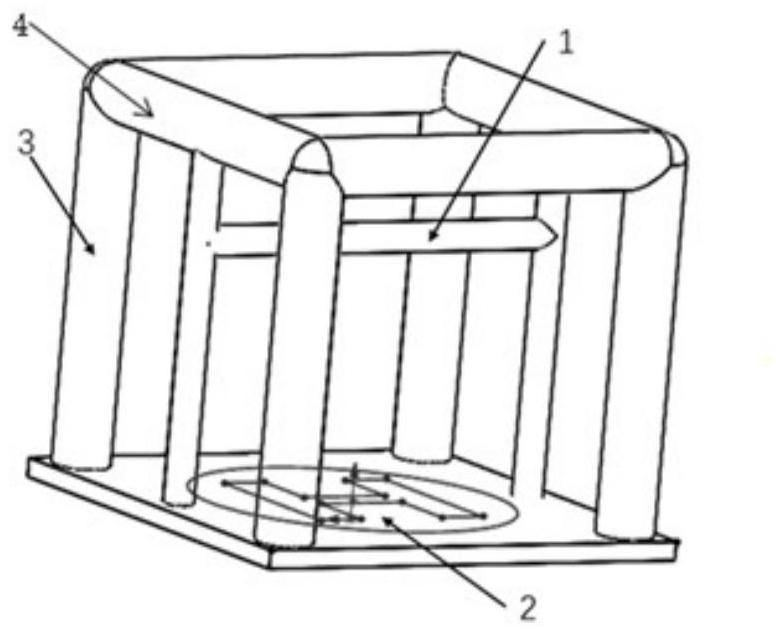
[0037] The present invention provides a four-rotor unmanned aerial vehicle autonomous landing control system based on an airship platform. The system includes: an unmanned aerial vehicle, a control terminal, an airship platform, a camera acquisition module, a communication module, a power system and a sensor module;
[0038] The UAV is equipped with a flight control module and a positioning and navigation module. The UAV is connected to the control terminal through the communication module; Whether the man-machine is directly above the docking position of the airship platform, so that the UAV can accurately land on the designated position of the airship platform; any of
[0039] The control terminal is located at the ground station, which is used to check the UAV's own status, monitor the UAV's flight status and check the flight log, and pre-set the UAV's flight path ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com