

Method and device for obtaining navigation map of working environment of mobile robot
A mobile robot and working environment technology, applied in the field of navigation, can solve problems such as failure to detect obstacles, frequent recalculation of paths, and wrong planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In the following description, numerous specific details are set forth in order to provide a thorough understanding of the application. However, the present application can be implemented in many other ways different from those described here, and those skilled in the art can make similar promotions without violating the connotation of the present application. Therefore, the present application is not limited by the specific implementation disclosed below.
[0088] A method for obtaining a navigation map of a working environment of a mobile robot provided by the present application will be described in conjunction with specific embodiments below.
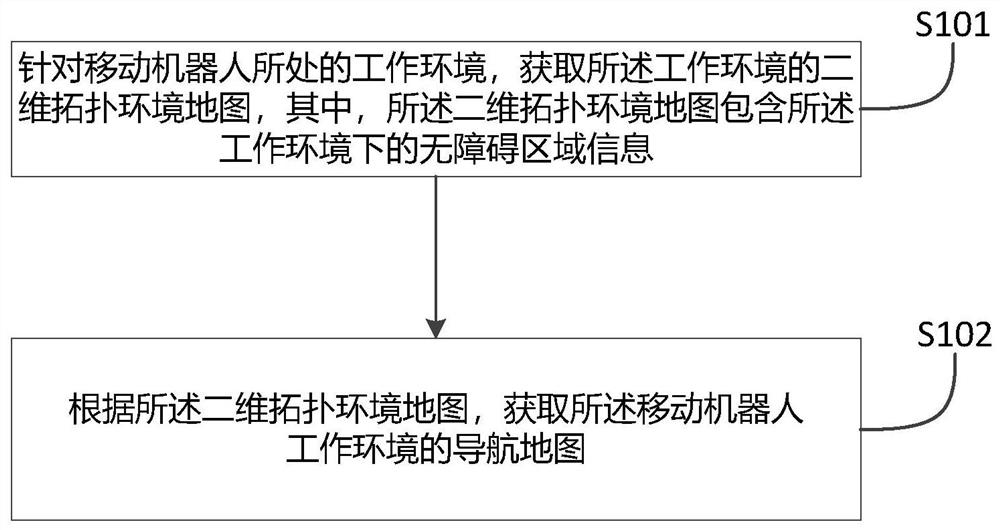
[0089] Such as figure 1 As shown, it is a flow chart of a method for obtaining a navigation map of a mobile robot working environment provided in the first embodiment of the present application. The following combination figure 1 This example will be described in detail.
[0090] Step S101, for the working environment where...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More