

Adjacent joint space trajectory transition method and device
A joint space and trajectory technology, which is applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of high time cost and energy consumption cost, and achieve the effect of reducing time cost and energy consumption cost, and reducing start-up and stop
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
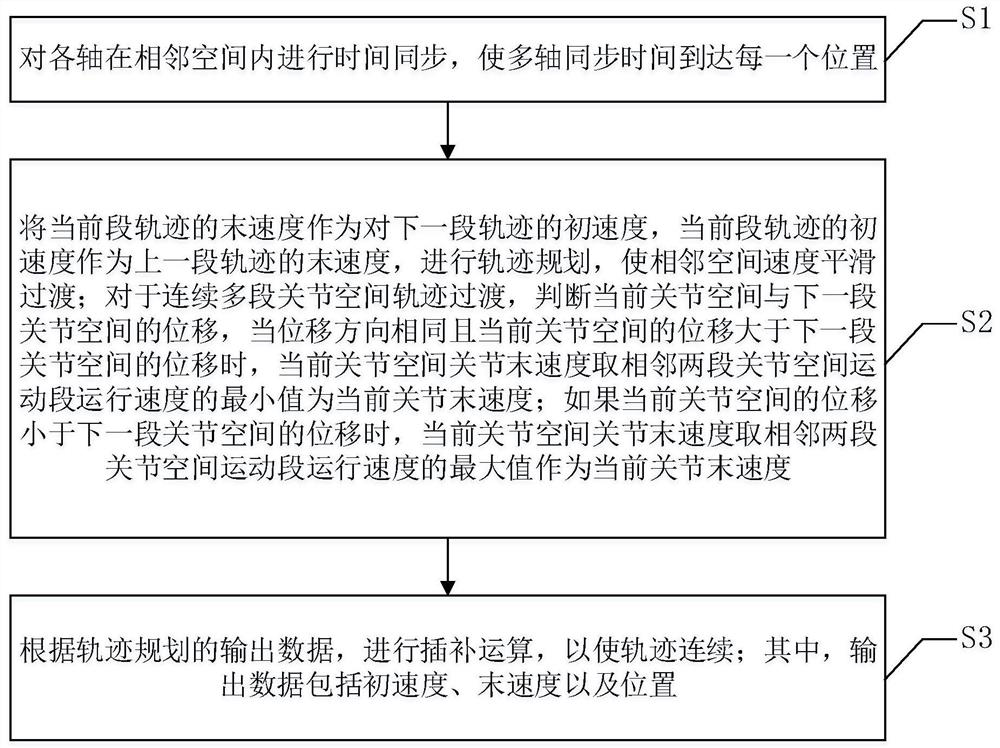
[0029] Such as figure 1 As shown in Fig. 1 , a method for the transition of adjacent joint space trajectories, the transition of adjacent joint space trajectories is mainly that the final velocity of the previous joint space command is used as the initial velocity of the next joint space command, and at the same time, the time synchronization of each motion axis of each joint space command is performed. . The methods include:
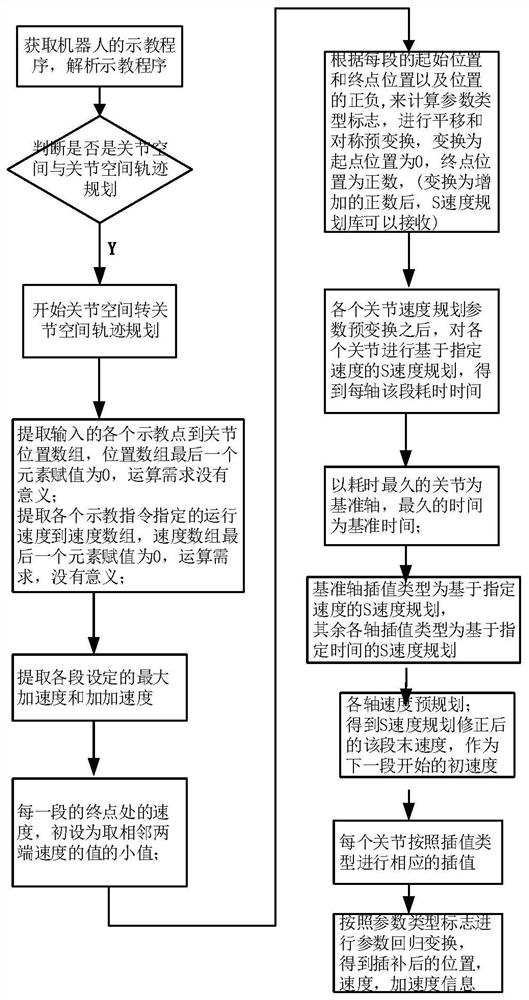
[0030] Step S1: Perform time synchronization for each axis in the adjacent space, so that the multi-axis synchronization time reaches each position. Each axis first calculates the single-segment PTP running time of each axis according to the input information and parameter adaptive S-speed planning, and then uses the maximum running time of each axis as the reference time, and other axes do S-speed planning based on the reference time , to realize the time synchronization of each axis of the single-segment PTP; among them, the parameter adaptive S spe...
Embodiment 2
[0045] Corresponding to Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides an adjacent joint space trajectory transition device, which includes:
[0046] The time synchronization module is used to synchronize the time of each axis in the adjacent space, so that the multi-axis synchronization time reaches each position;
[0047] The trajectory planning module is used to use the terminal velocity of the current segment trajectory as the initial velocity of the next segment trajectory, and the initial velocity of the current segment trajectory as the terminal velocity of the previous segment trajectory, and perform trajectory planning to make the adjacent space velocity smooth transition; for continuous Multi-segment joint space trajectory transition, judging the displacement between the current joint space and the next joint space, when the displacement direction is the same and the displacement of the current joint space is greater than th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More