

Multi-node Cooperative Landing Position Planning Method Based on Genetic Particle Swarm Optimization
A particle swarm algorithm and multi-node technology, applied in aerospace deep space exploration, artificial intelligence field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
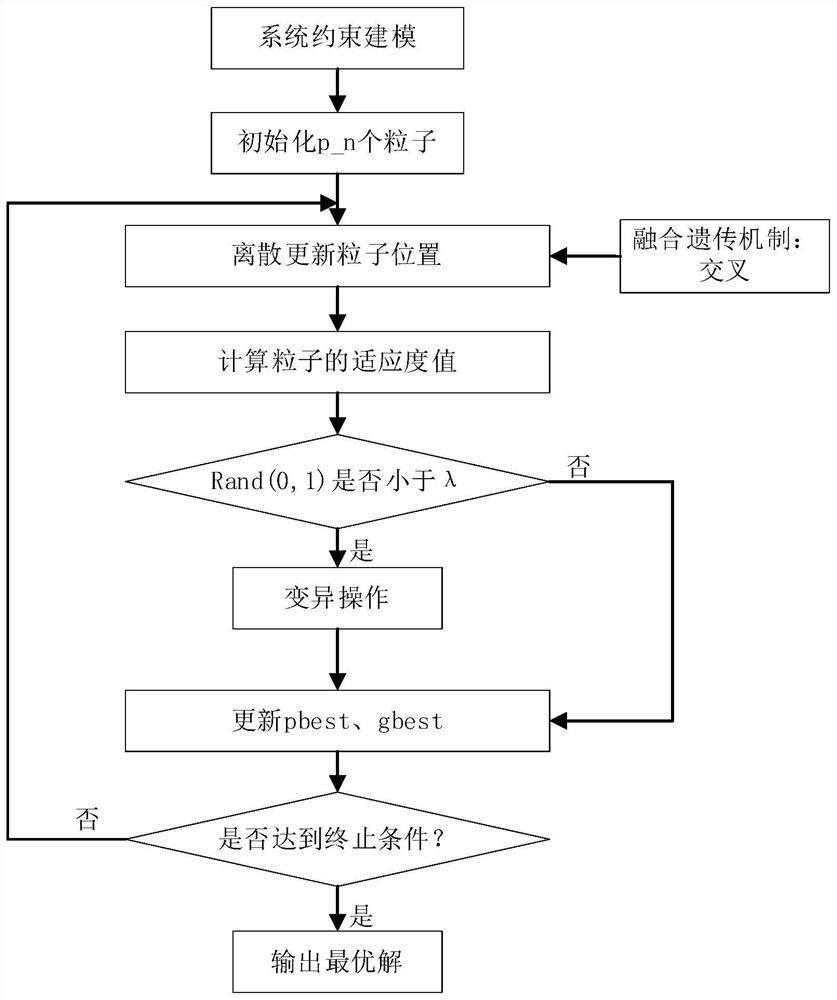
[0059] A multi-node collaborative landing position planning method for detectors based on genetic particle swarm optimization, such as figure 1 As shown, the specific implementation process is as follows:
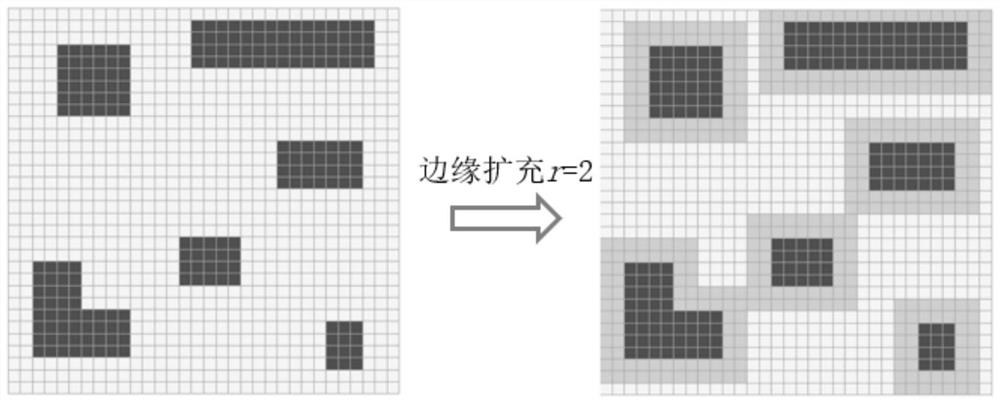
[0060] Step 1: Take the landing zone raster map data obtained by the probe as input. The coordinates (x, y) of each grid point represent the landing point, and the grid map of the detector landing area is abstracted to only distinguish between obstacle areas and non-obstacle areas. The grid map data used in this embodiment is as follows: Figure 6 As shown in , the raster image is a 32×32 matrix, 0 indicates a non-obstacle area, and 1 indicates an obstacle area.
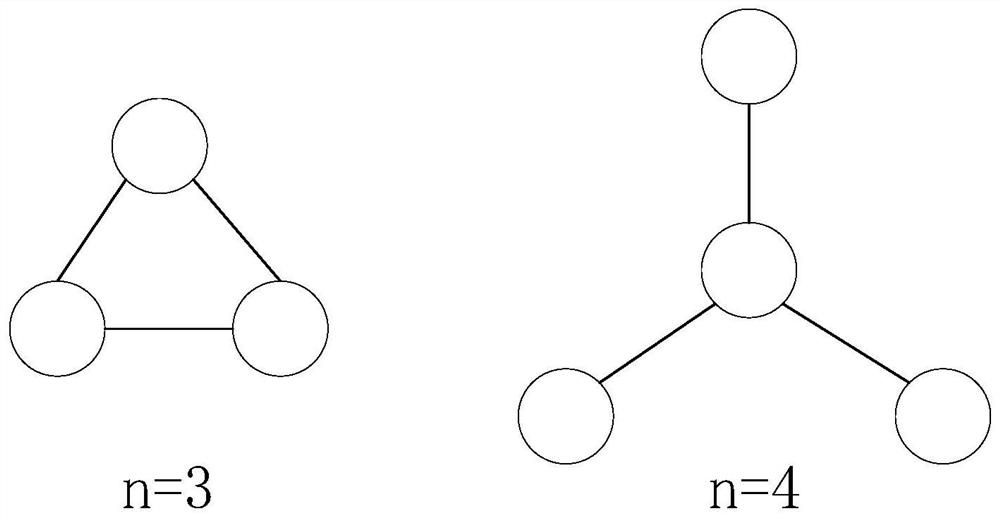
[0061] Step 2: Set the node connection mode of the detector, namely:
[0062]
[0063] Initialize the detector constraint parameters, set the number of nodes n=3, node radius r=2, and the minimum distance between nodes d min = 10, the maximum distance d between nodes with flexible physical connections max =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More