

Target pose measurement method based on calibration object
A pose measurement and object calibration technology, applied in the field of computer vision, can solve problems such as difficulty in planning a motion path and selecting a grasping angle of a robotic arm, misidentification of target object feature information, and difficulty in identifying target objects, so as to eliminate environmental interference, The effect of improving work efficiency and reducing labor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
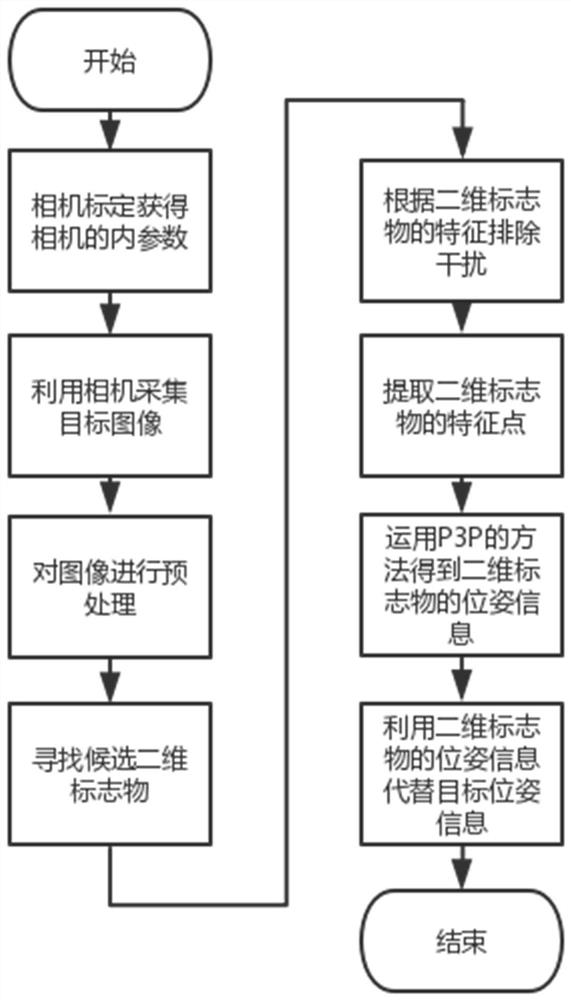
[0074] The present invention is a target pose measurement method based on a two-dimensional calibration object. The present invention designs a two-dimensional calibration object, so that the camera can accurately identify the feature points on the two-dimensional calibration object in a complex background image, thereby obtaining The pose information of the target object, the method flow is as follows figure 1 , the specific steps are:
[0075] Step 1. Perform camera calibration to obtain the internal parameters and distortion parameters of the camera, as shown in Table 1:
[0076] Table 1 Camera calibration results
[0077]
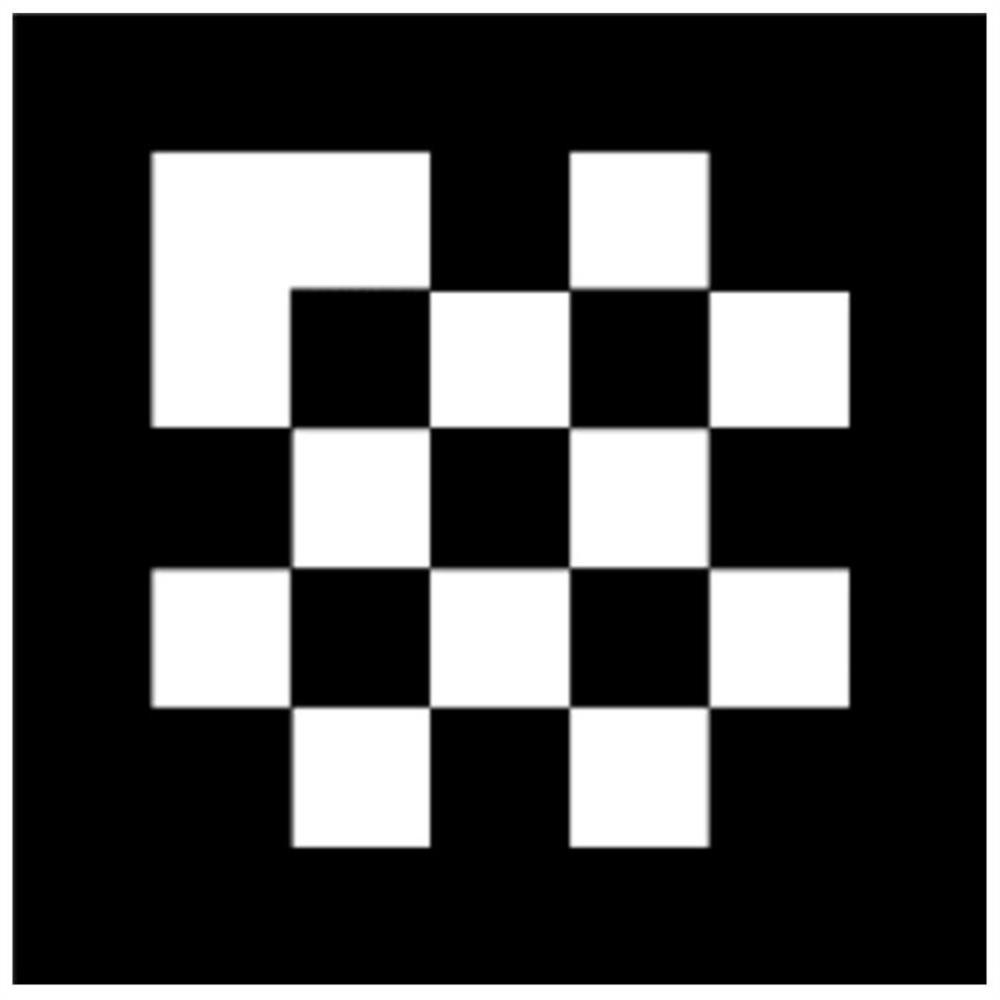
[0078] Step 2. Paste the designed two-dimensional calibration object on the surface of the measured object, and collect the image of the measured object through the camera. The physical size of the two-dimensional calibration object is a square of 50mm*50mm, and consists of 7*7 squares , the outermost 24 squares are all black. After removing the ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More