

Underwater sound source azimuth and depth cooperative tracking method based on bottom-supported single three-dimensional vector hydrophone
A vector hydrophone and three-dimensional vector technology, which is applied in the direction of instruments, positioning, and measuring devices, can solve problems such as system complexity, and achieve high reception signal quality, high efficiency, and high deployment stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
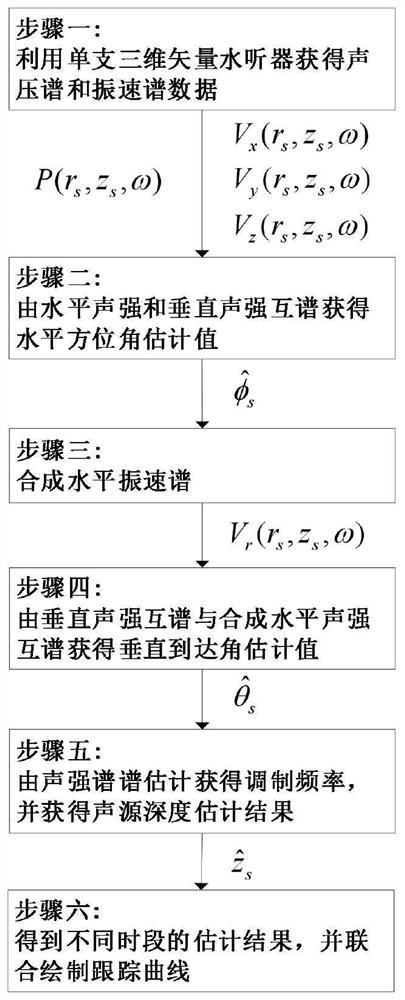
[0066] A method for cooperative tracking of sound source azimuth and depth in water based on a single three-dimensional vector hydrophone sitting on the bottom, the method for cooperative tracking of sound source azimuth and depth in water comprises the following steps:
[0067] Step 1: Use a single three-dimensional vector hydrophone placed at the depth of the seabed to receive the acoustic signal from the sound source near the upper surface of the sea, and generate sound pressure spectrum and vibration velocity spectrum data;
[0068] Step 2: Based on the sound pressure spectrum and vibration velocity spectrum data in step 1, the estimated value of the horizontal azimuth angle is obtained from the cross-spectrum of the sound intensity in the horizontal x direction and the sound intensity in the vertical y direction
[0069] Step 3: Use the horizontal azimuth estimate from Step 2 Synthetic Horizontal Velocity Spectrum V r (r s ,z s ,ω);
[0070] Step 4: Obtain the vert...
Embodiment 2
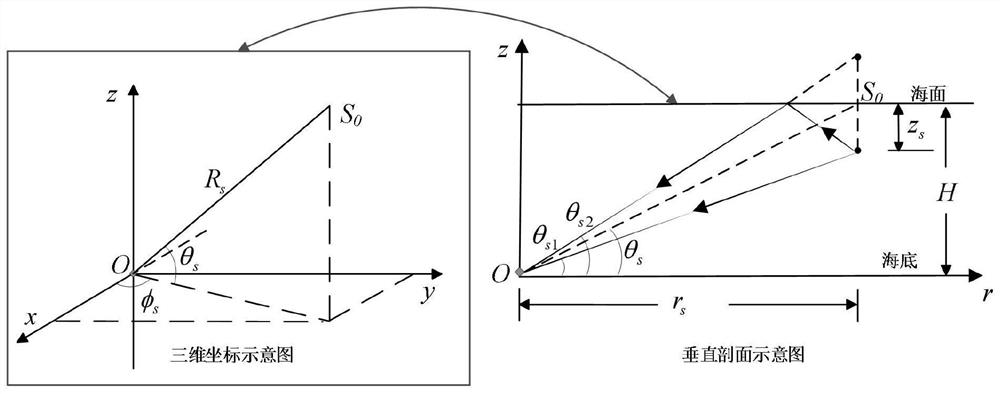
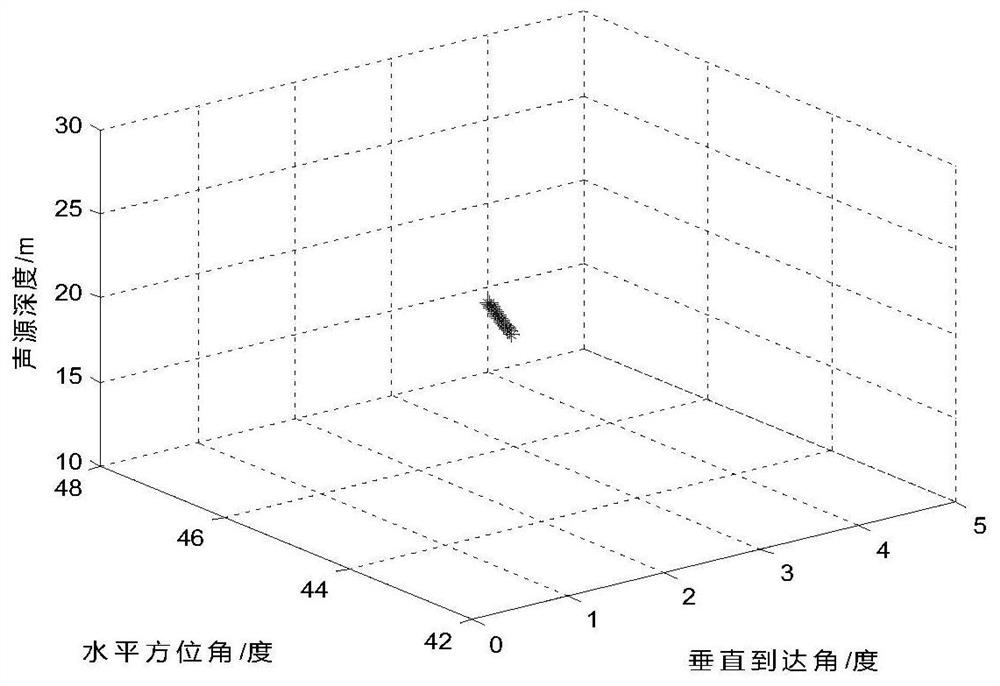
[0114] The seawater depth is 500m, and the single three-dimensional vector hydrophone is deployed at a distance of 1m from the seabed. The sound source frequency is 200Hz, the sampling rate is 3.2kHz, and the sound velocity in water is 1480m / s. The sound source is located at an underwater depth of 20m, and the horizontal azimuth angle to the hydrophone is 45 degrees. The sound source moves from the horizontal distance vector hydrophone at 10km to 15km, and the data during the movement is processed in segments. The snapshot is 1024 to ensure proper spectral resolution. Under the condition that the spectral level signal-to-noise ratio is 10dB, draw the joint tracking curve of horizontal azimuth angle, vertical angle of arrival and depth during the movement (such as figure 2 shown), and analyze the estimation error (such as image 3 , 4 , 5 shown).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More