

Robot external active gravity compensation system and simulation verification method
A technology of gravity compensation and simulation verification, applied in the field of robotics, can solve the problems of reducing joint response ability, not applicable to gravity compensation of large mass loads, and unable to simulate and verify the control effect of active gravity compensation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with accompanying drawing:
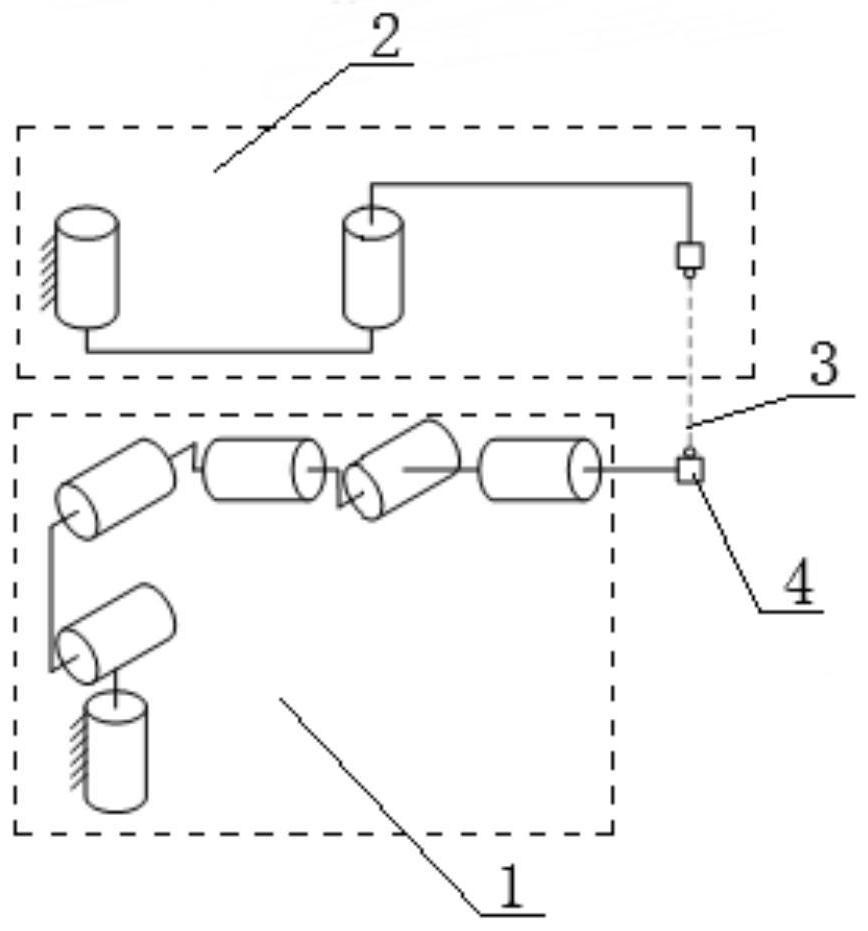
[0037] Such as figure 1 As shown: the present invention includes a gravity compensation device 2 and a gravity compensation rope 3, the force end of the gravity compensation device 2 is connected to one end of the gravity compensation rope 2, and the other end of the gravity compensation rope 2 is connected to the force end of the serial robot 1 , the force application end of the serial robot 1 is connected to the end load 4 at the same time.
[0038] When using a small 6R robot to complete the assembly task of large-mass parts, in order to ensure the freedom of movement of the robot, an external gravity compensation system is used to directly compensate the gravity of the large-mass load at the end. The structure of robot and gravity compensation system is as follows: figure 1 shown. A variable-length belt-driven rope is used to connect the end of the robot to the end o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More