Industrial robot calibration method considering parameter coupling
A technology of industrial robot and calibration method, which is applied in the field of industrial robot calibration, can solve the problems of not considering, not considering the coupling relationship of geometric parameters, and unsuitable robot calibration, etc., and achieves the effect of convenient compensation and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] A method for calibrating an industrial robot considering parameter coupling of the present invention will be described in detail below in conjunction with the embodiments and drawings.
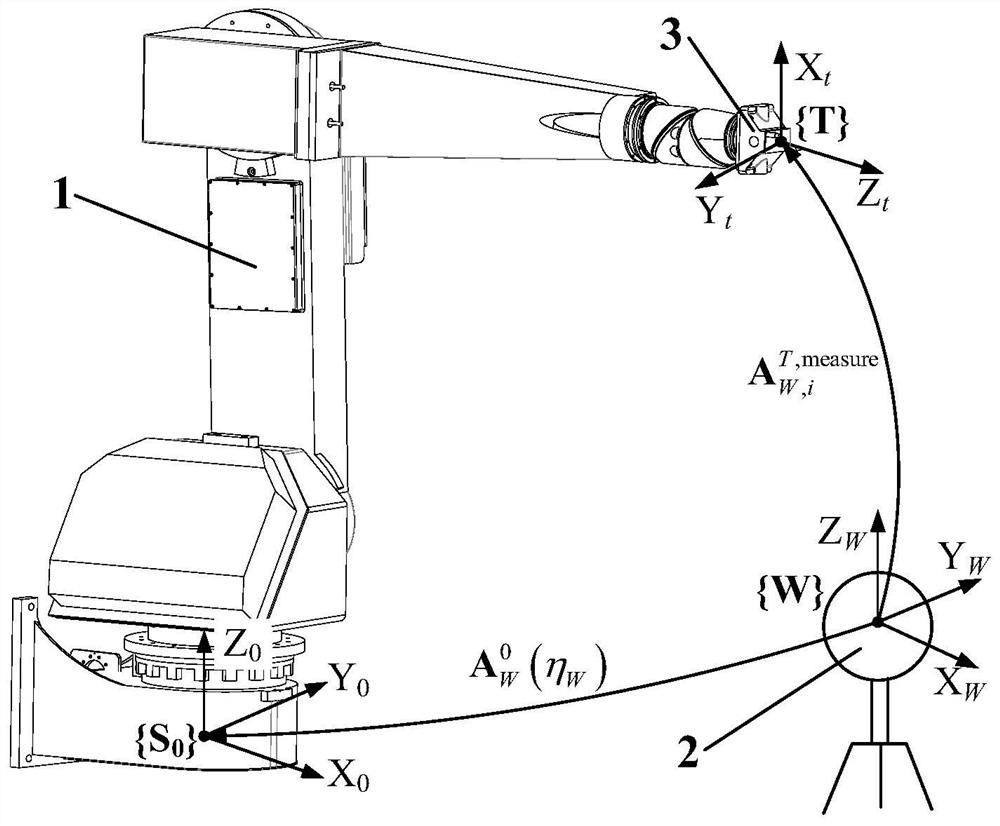
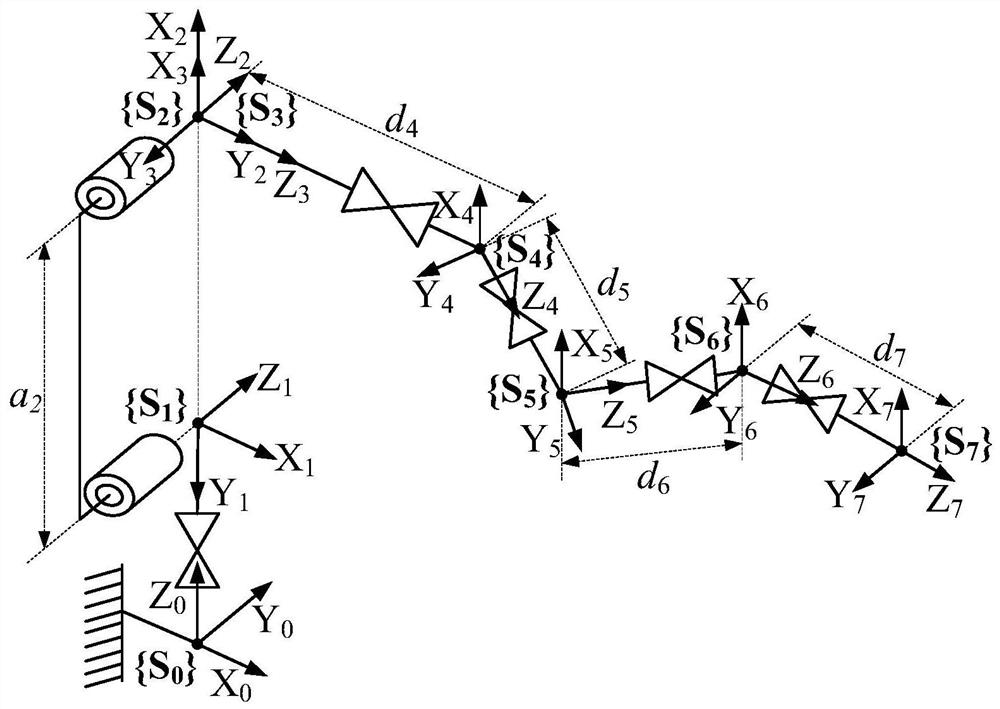
[0039] Such as figure 1 , figure 2 , image 3 As shown, a kind of industrial robot calibration method considering parameter coupling of the present invention comprises the following steps:
[0040] 1) Provide an industrial robot 1 with parameter coupling, a measuring device 2 independent of the industrial robot and a terminal calibration tool 3;
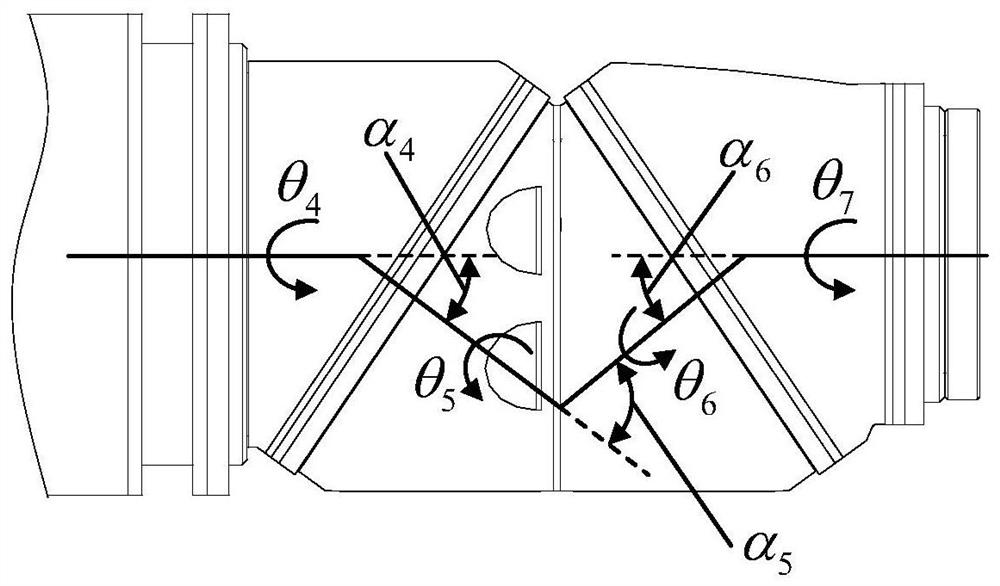
[0041] The industrial robot 1 has six degrees of freedom of motion and is composed of 7 sequentially connected rotary joints. In order to avoid redundancy, the rotation angle θ of the fifth rotary joint of the industrial robot is 5 and the rotation angle θ of the 6th revolving joint 6 Motion constraints are set between: θ 6 =-θ 5 , introduce a coupling relationship between the kinematic parameters of the industrial robot according to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More